
汽车倒车时总会让人神经紧绷,因为视野狭窄,很容易出事故。我们不是《速度与激情》里的范·迪塞尔,能在古巴首都哈瓦那把一台老爷车倒着奔向终点。
更多时候,恐怕是一不注意就栽到沟里。
汽车安全说了这么多年,工程师是如何想办法避免事故的?
一、汽车有哪些防倒车事故机制
汽车最常见的倒挡事故有两类,一类是误挂倒挡,一类是倒车中与障碍物碰撞。
为了避免此类问题发生,工程师确实想出了解决办法。
1. 误触倒挡机制
手动变速箱的倒挡一般位于1挡的左边或是5挡下边,误挂概率小;如果是副驾驶误碰,因为手动变速箱换挡需要踩下离合器,因此也是无效的。而且变速箱的工作原理也能应对误触问题,手动变速箱在行驶时,变速箱内的齿轮都处于高速运转的状态,这个时候想要误挂倒挡也是几乎不可能的。
如果是自动挡,这种误触更不是问题了。如今一般车型上都会有挡位锁止,误挂倒挡的操作可能性很小,以元PLUS来说,换挡时需要按住“UNLOCK”锁。
而且自动变速箱是自动控制的,ECU会时时刻刻对车辆的挡位及行驶情况进行监控,在你误挂倒挡之后,ECU知道你在行驶,仍会把挡位保持在D挡。
2. 怀挡和虚拟挡怎么解决误触
奔驰曾经推出过在低速行驶时可由D挡直接推至R挡的方案,但是被认为如此采用怀挡换挡存在误操作的安全隐患。官方对此作出解释:“此设计为了便于驾驶员在低速状态下进行频繁换挡的操作,当车辆时速超过11km/h时,则无法实现由D挡到R挡的直接转换。”
此番解释也能接受,毕竟在低速状态下,确实存在车辆需要频繁前后挪动的工况,只不过对于车主而言,一定要提前适应车辆逻辑,否则一不小心就会惊出一身汗。
当然,要说这种设计有没有必要,可能就见仁见智了。比如阿维塔12同样是怀挡设计,使用起来就丁是丁卯是卯,反而让新车主更容易掌握它的工作逻辑。
另外一种争议更大的设计是特斯拉采用的虚拟换挡。但必须给特斯拉正名的是,这个功能从操作逻辑上看,有点像苹果手机的滑动解锁,其实短暂的误触是不会触发换挡的,所以不太容易出现误触(这个功能被诟病的主要原因是虚拟按键不如物理按键可靠)。
另外,像新款Model S/X车型,还可以省掉换挡的工作,更没有误触的麻烦。它的工作逻辑是,车辆仪表盘上提供驾驶员踩下制动踏板以触发挡位自动旋转,车辆可以根据周边环境以及驾驶者的驾驶意图,自动为车辆选择切换到前进或者倒车挡位。当然,虽然这么做是解决误触了,但不得不说这种设计很大胆,车主的学习成本很高。
这种“意念换挡”的功能,更考验汽车本身的识别能力,如果识别有误问题就大了。
3. 倒车车侧预警系统
主要用于监测是否有侧向车辆从后方驶来,避免倒车时发生不必要的碰撞。
倒车车侧警示系统采用毫米波雷达传感器,一般安装在汽车后保险杠内侧的防撞梁上,当倒车车侧预警系统检测到危险时,会通过“信号提醒+报警声”的方式提醒驾驶员。指示灯亮,并伴有报警声。
现在还有一些车型配备了紧急自动刹车功能,拿大众ID.4 X来说,在倒车车速小于10km/h时它会自动开启该功能,如遇到障碍物时会帮助驾驶员刹停。
很有趣的是,ID.4 X可以常关“前进急刹”功能,“倒车急刹”功能虽然也可以手动关闭,但在下次启动电车时会自动恢复到开启状态。这或许是车企发现倒车碰撞比前进碰撞的频率更高,所以采取了一定的强制使用机制。
二、为什么汽车还不能识别“高低落差”危险
现有的倒车预防机制已经很完善,但保不齐还是会有问题。
现有的汽车预防碰撞(带主动刹停)功能,主要是对障碍物起作用,如果后方是地沟、水塘这种高低落差很大的地方,它就判断不出来。
可以预见,未来汽车要变得更安全,识别“高低落差”危险是重要能力。
根据过往的一些技术积累,以及辅助驾驶正在发展的方向,未来以下技术能派上用场。
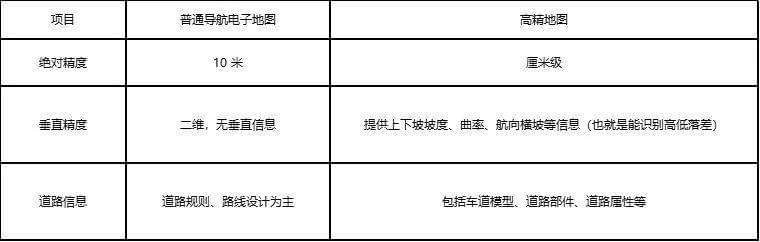
1. 高精度地图
要做到心中有数,高精度地图肯定是最佳选择。相较于普通的导航电子地图,高精度地图的优势是能提供完整且精确的路面信息,对于高低落差的问题,有高精度地图的车辆可以快速识别,做到准确预防。
当然,现阶段高精度地图的成本是一大问题,而且因为地缘政策的原因,它的发展速度明显放缓。如果单就倒挡驾驶时的高低路面识别来说,我们也能找到其他的解决办法。比如以下要提到的几种,现在就有预防危险的能力。
2. 扩大倒车雷达的视角
很多高低落差较大的区域,会设有一点路槛,如果汽车能识别它,依然有可能因识别出障碍物而触发倒车自动刹车功能。如果扩大倒车雷达的视角范围,就能提早发现路槛,及时刹停汽车。比如ID.4 X就被吐槽过,说在地下停车库时,因为识别到限位桩而刹停。
3. 开发专门的高低路面驾驶辅助功能
不过更多时候,有高低落差的路面是没有阻隔的,需要汽车自己能识别出来。为此,就要开发专门的高低路面驾驶辅助功能。
在这之前,我们需要知道自动驾驶辅助系统的一个基本工作逻辑——自动驾驶是怎么读懂外界的。
激光雷达、毫米波雷达、摄像头等,我们都可以称之为感知硬件,它的作用是让汽车能“看”到周围的事物。
但“看到”和“读懂”之间还有一段距离,为此,我们需要通过一些手段让汽车读懂看到的事物。现有做法是在开发阶段对场景中的参与要素进行标注,帮助系统认识什么是车、什么是人、什么是车道线,也就是所谓的白名单机制。
但在真实场景中,存在很多违停的车、掉落的石头、散落的纸箱等异形障碍物,很难通过“白名单”提前标注。洞坑悬崖、水塘等也是如此,由于它们的表观差异特别大,很难通过白名单的方式解决。
因此,需要特别事情特别对待,每次都要保持高度警惕。现在检测道路洞坑悬崖以及路面障碍物的最佳办法是先获取路面的三维信息,之后进行识别,如果识别到三维信息变化非常大,汽车就应该立即对其提高警惕,并实行刹停。
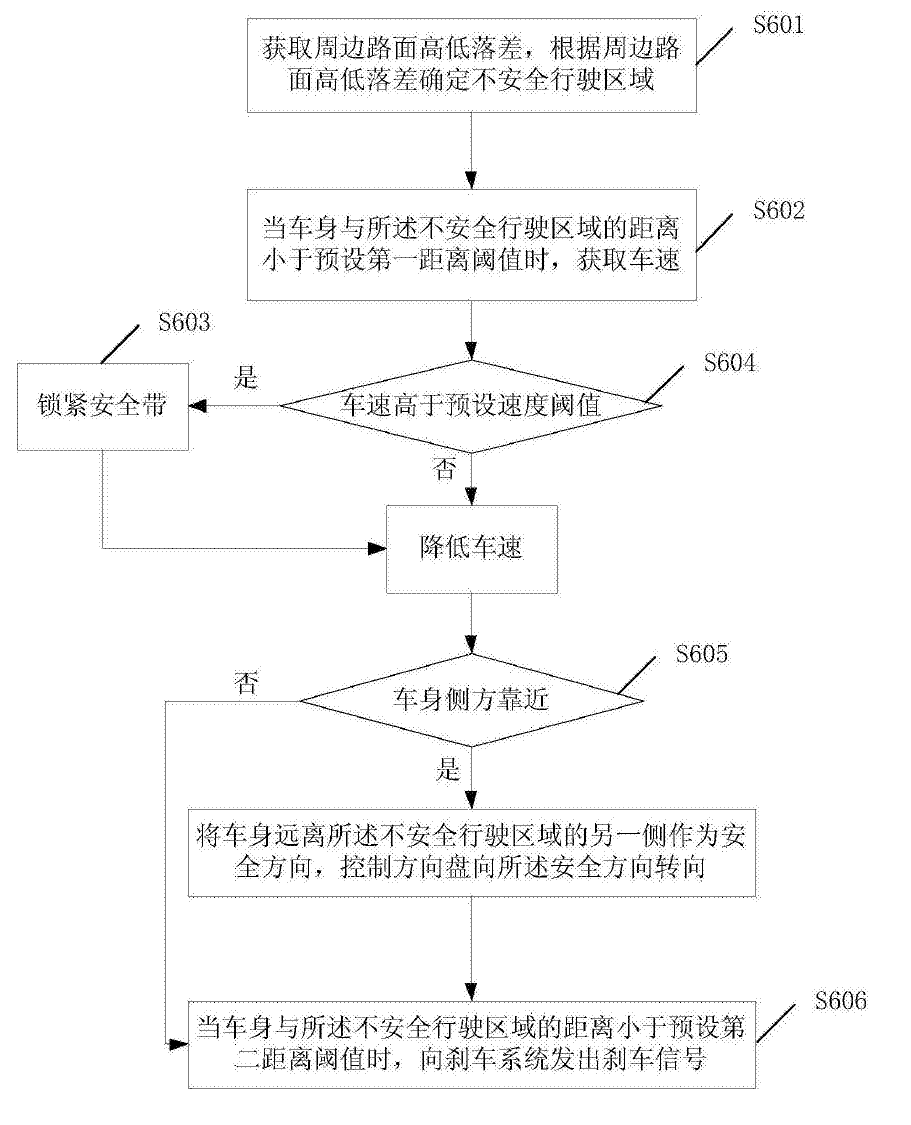
比如下面这个专利所示的办法,它设计了一套工作机制。简单来说,当高低落差达到某一个阈值时,系统会通过刹停或者自动转向的方法来规避危险。
当然了,要提醒大家,不论哪一种辅助驾驶功能,都只是你的帮手,如果你认为有帮手就能肆无忌惮地开车,最后肯定会遭殃。
三、总结
已经有了很多的预防机制来防止汽车误挂倒挡,其实如果驾驶员稍微认真点,就不至于出现危险。当然,有些时候人脑就是会短路,不知道怎么回事就犯了错。
要感谢城建发展,汽车行驶中遇到高低落差的情况已经很少见了。不过如果汽车能更全面地应对,肯定是好事。相信未来汽车不仅可以重点关注障碍物,对可能出现的沟壑、水池等,汽车也能快速识别,及时刹停或躲避。
本文来自微信公众号:autocarweekly (ID:autocarweekly),作者:七号_宋