
本文来自微信公众号:宇多田(ID:hellomusk),作者:宇多田,原文标题:《救火,救火!》,头图来自:电影《勇往直前》
“救火,我们擅长‘救火’。”
当我困扰于仍然无法明确“汽车中间件”的定义后,映驰的产品工程师想了想,从外面搬进来一个铁盒。
这是一个与苹果Macbook面积差不多大小,厚度却有两倍的盒子。打开盖子,是两枚地平线的J5(SoC)与一枚恩智浦的399(MCU),还有周围密密麻麻的信号感应器。
它有一个你今年肯定更熟悉的名字——域控制器。
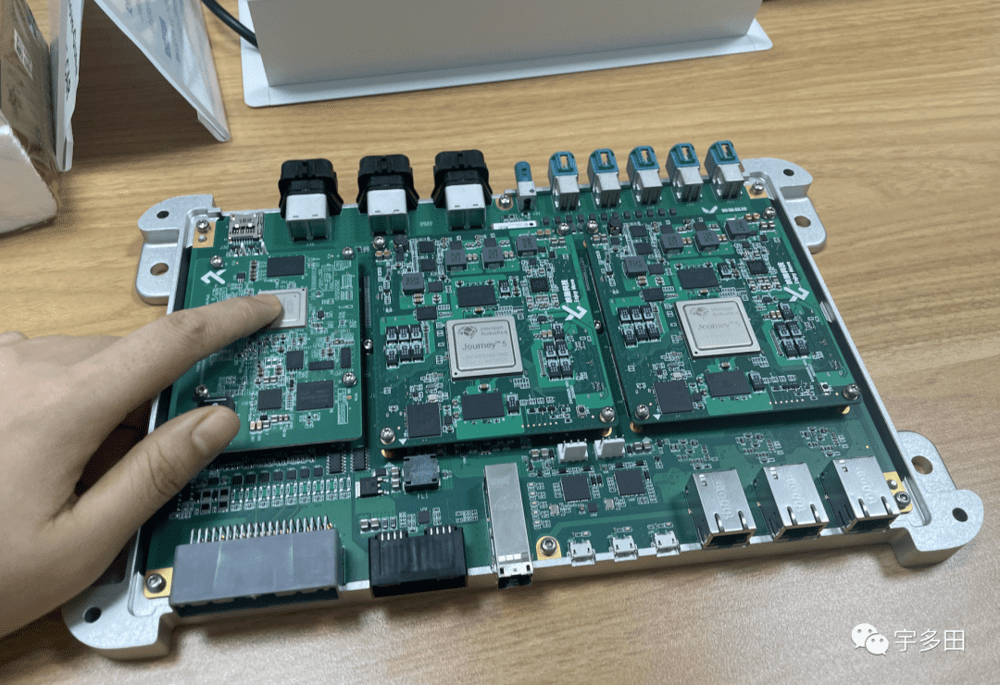
在这个盒子的基础上,他开始往上依次叠加“积木”——Linux操作系统(或QNX)、中间件以及我最熟悉的辅助驾驶系统与各类传感器。
“这是一道数学连线题。” 只不过复杂度可能是“奥数级别”。
摄像头、毫米波与激光雷达,无论它们在车的哪个位置,注定都要被拇指粗的以太网线连接到这几块MCU和SOC上。
当按下开关,代码启动,数据开始来回流窜,感知算法开始运转。就在你以为一切都会各司其职,问题才开始像洪水般如约而至。
曾有芯片技术大佬吐槽2021年流行的“遇事不决,算力来解”理念:“30 tops 明明在那辆车上能带起5个摄像头,怎么在你这里,就连数据都传不过去?”
这个时候,芯片与操作系统之上,中间那团类似于云计算PaaS层的代码集群,可能会起到抽丝剥茧的关键作用——
为8个困于迷宫中心的人,找到他们通往8个出口的最短最优路径。
“你理解的没有问题,这有点类似于云计算中的‘容器技术’。”
映驰工程师的确认为云计算中的“容器技术”与汽车中间件,有异曲同工之妙。
容器存在的价值,就是为了降低算力成本,将一个个可能会互相争抢资源的云端任务和应用,隔离在一个个孤立的“瓶子”里,做到互不打扰。
同时,又能根据“任务”的增加和减少,对资源进行灵活调度。
因此,尽管当下汽车中间件市场炒作声四起,每家说法和概念都各成一派:操作系统,AutoSar AP/CP、SoC+MCU、DDS、SOA服务架构或者是汽车SaaS……
但如果从解决问题侧来看,“中间件”的任务简单明了——
它是一个资源调度大师,也像一个多功能灭火器。它的存在,很有必要性。
“举个例子,摄像头数据给SOC处理,激光雷达交给MCU对付,它俩融合的数据该放在哪里?不同的选择,会导致截然不同的通讯效果。”
工程师指出,这里面注定会有路径“最优解”问题。
而引发的延迟,会在多个环节出现——片上,片间,以及数据向上行进过程里的代码丛,解决难度不一。
没有中间件,ADAS能力就得直接调用操作系统接口。而操作系统一旦出现问题,就会导致牵一发而动全身的后果。
而从安全角度考虑,要让ADAS达到高安全等级,AUTOSAR这一标准协议也必然有其价值所在。禾多域控负责人就曾指出,AutoSar AP的PHM监控管理的确是三重必要的安全保证之一。
“所以,我们也是一个会半夜两点被call的角色,做个消防员,灭火。”
一、矿边卖水
10年前,特斯拉才推出第一款车,Moilbeye的黑盒子还在半统天下,英伟达刚刚走出困境,激光雷达刚被用在谷歌的拼装L4车身上……
这些新一代汽车中间件创业公司的土壤成分,开始有意识地凝聚。
从融资信息来看,你会发现,大部分提及辅助驾驶域控制器方案的中间件公司,都成立于2014年之后。
另外,自动驾驶产业应该不会有人忘记2017年横空出世的激光雷达版奥迪A8,其中间件开发也始于2012年。
后来,太多细分赛道因自动驾驶能力而生,譬如激光雷达和高精地图。但新一代“中间件”有一些细微差别——
他们因这项能力上车而陷入困境的“边界”而生。

历史总是相似的。
如果再往后倒退20年,一位汽车工程师曾把某国内销量火热的合资品牌车的中央通道拆开,发现管道里被“嫁接”了17个盒子。每个盒子都是一个控制器,只负责一个功能。
简单粗暴直接,谁连谁就控,这就是典型的硬线通讯。
20世纪90年代,由于车窗、雨刷以及信息娱乐系统等等各个ECU通讯接口混乱,各自为政,车厂苦于此已久。这也促使博世一“怒”之下在1986年发布了Can通讯网络协议。
20年后,这项协议成了一项被超过50家半导体厂商支持的国际标准。
汽车半导体有个极大的特点——因对成本极为敏感不能支持多余功能,但想要的功能却一个都不能少。
那么,这就促使芯片商也必须参与到上层软件的标准化制定里——软件野心可以大,但要提高软件在不同硬件配置上的复用兼容性。
因此,Can协议的推广也让中间件概念在此时有了雏形;而中间件协议标准Autosar,就是这么诞生的。
20多年过去,基于传统汽车EE架构的中间件市场,已经形成了赢家通吃的稳定局面——
Vector与Etas等几家公司在这个市场大杀四方,中国厂商最多是做一些国产替代和服务。
但很明显,许多业内人士认为,与历史一样,自动驾驶域与座舱域的加入,既能加快改变底层架构,又能改变市场格局——中间件新一轮“诞生、成长与灭亡”的时间点会随之而来。
三年间,如果你至少走过一趟展会,就会发现基于座舱和泊车的域控制器厂商占据了半壁江山。
而座舱能力配置的域控制器,通常是一枚MCU+一枚SoC;而行泊一体能力,则配置了一枚MCU+N枚SoC。
(这里从另一个角度提一嘴。5年前,打开L4 Robotaxi乘用车的后车盖,都外接了N块英伟达Xavier和英特尔X86,后来才有了把计算平台都给塞进车里的做法,再后来就有了车规级英伟达Orin SoC。这些历史都或间接或直接推动了汽车底层硬件架构的变革。)
因此,新一代SoC厂商兴奋地往车底钻,MCU也依然有自己的位置。那么专门调度芯片群,守护上层系统稳定运行的看门人——
中间件,也必然要提升自己的武力值。
因此,有投资人从四五年前就看到了市场这个空白,甚至看到了国产替代的盲区,是一件了不起的事情。
但是,很多时候,譬如2018年火出圈但后面却全面消声的“高精地图”,太多细分赛道,并不会像大家一开始想像的那样发展下去。
特别是在中国。
二、不厚,危
如果你看过今年我在7月发布的一篇《软件大败退》的文章,那么你可能会充分理解我在这个部分想要说的内容。
“中间件”的诸多特质,很容易对应到开发所需要的人才——
首先,要懂不同种类芯片的架构设计。
地平线智能驾驶应用软件部负责人解释,做软件性能优化,需要深入理解芯片内存的层级系统。
譬如,一枚SoC有多个硬核,那么存储器DDR到底要给到哪个硬核才能让它的响应最高?此外,SoC厂商也必然会充分测试多枚SoC的通讯与资源调度效率。
其次,中间件也要懂上层软件。当一个系统里有十几个摄像头、几个激光雷达,整个系统的中断频率会很高。
“那么软件究竟如何配置中断,与CPU之间中断响应如何绑定?”
某种程度上,今年市场虽然在大谈“软硬解耦”,但其实无论怎么剥离,能力都是骨肉相连,只是每家公司擅长的侧重点不一样。
即便车厂想要上层软件不受硬件束缚迅速迭代成长,但无论是早期的架构设计还是后期的代码优化,这都对软硬一体理解力提出极高的要求。
那么最有趣的问题便来了:
鉴于对芯片架构的深刻了解,芯片厂商就做不了中间件吗?
而对算法和传感器的精通,辅助驾驶开发商没有向下兼容的野心吗?
英伟达早在2017年就开发了自己的中间件平台DriveWorks,而在国内地平线也有自己的中间件工具链。今年,越来越多芯片公司开始趁热度,陆续发布了基于SoC+MCU的中间件平台。
同时,辅助驾驶厂商的危机感很强,更是在努力“做的无比厚实”。譬如禾多今年也发布了自己的中间件平台HoloSar。
最上层和最下层公司都向中间靠拢吞食了“中间件”,以此来与自己的核心产品强绑定。
那么,旧时代霸主们基于对软件的积累,不能开发出新一代中间件吗?实际上,Vector等企业都有自己针对L2+的AP产品矩阵。
“我们不会特别强调自己是中间件公司,”在映驰科技的产品手册里,“高性能计算平台”取代了软件类措辞。
因为他们也加厚配置——与域控制器等硬件捆绑在一起,同时拓宽和保留自己最核心的优势。借此,他们也拿到了类似于Tier1的车企项目。
这的确是一个适应中国市场的生存路径。
软件采买机制在中国市场具有一定的复杂性,而原来着重强调软件研发实力的公司,都开始变得对硬件愈加执着。
当然,身份也便变得愈加相似。
映驰科技VP在一场公开演讲中曾提到,2018年他们捕捉到了中间件这一发展方向,但调研了当时在这一领域成绩非常优秀的各家公司,发现真实情况是——
“学我者生,抄我者死”。
“很多人认为先将国外的东西复制一套,但国外有国外的生态和需求,国外能成功的一套方案或者供应链,拿到国内简单复制,真的可以成功吗?”
因此,当今年我看到有不少中间件创业公司开始称呼自己为车载SaaS时,的确略感不安,因为似乎又看到了五六年前发誓要把地图给量产化的高精地图公司们。
到底是期望被收购还是希望做Tier2,可能收入这一关就很难过了。
本文来自微信公众号:宇多田(ID:hellomusk),作者:宇多田