
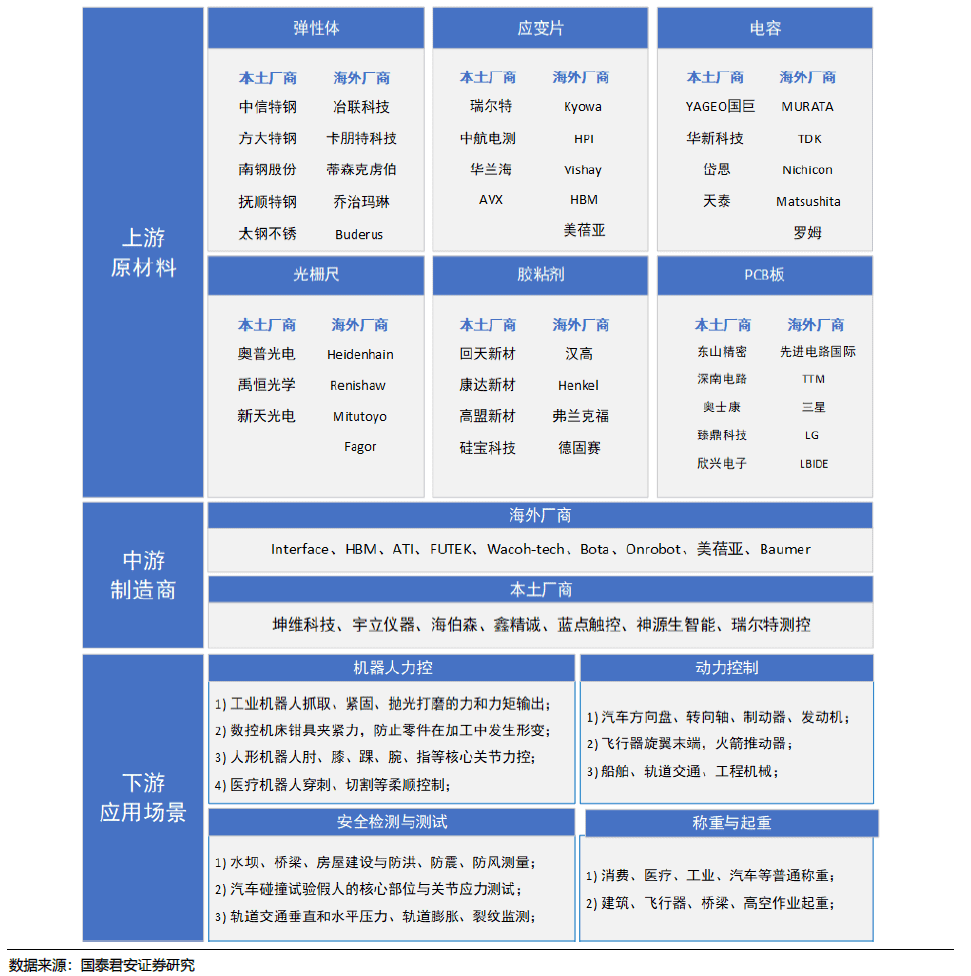
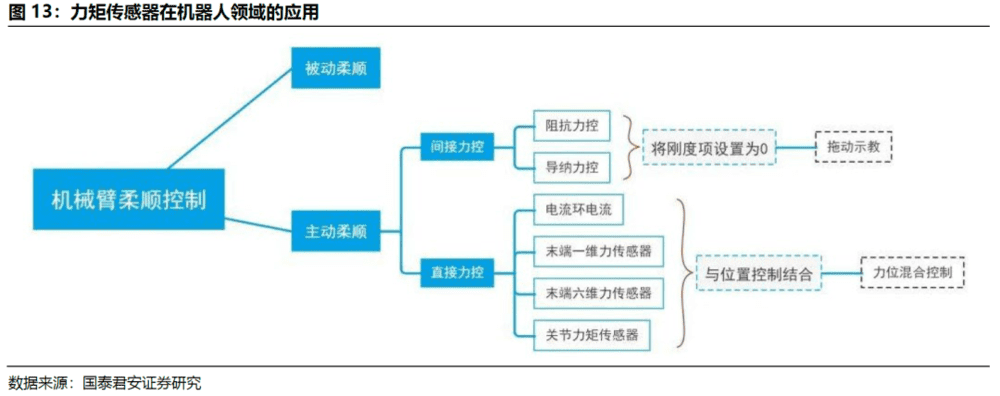
六维力矩传感器,助力机器人的柔顺控制。随着机器人技术的快速发展,机器人应用越来越聚焦于机器人与环境发生交互的场景,如打磨抛光、柔顺装配、医疗康复等,对机器人柔顺控制的需求快速增长。对人形/四足机器人、外骨骼机器人而言,柔顺控制对于复杂地形的通过能力、人机柔顺交互能力也非常重要。力矩和位置结合,机器人可以实现更加柔性的控制。
预计2027年工业场景六维传感器需求为4.2万套,2022~2027年CAGR超过50%;当人形机器人年销量达到100万台时,对六维力矩传感器的年需求为400~1600万套。与人工打磨相比,机器人打磨能提高效率和产品良率,降低成本,机器人装配、抛光打磨场景渗透率进入快速提升阶段。2022年中国六维力矩传感器销量/规模分别为8360套/2.39亿元,预计2027年将分别达到42000套/15亿元,CAGR分别为57.97%/52.04%。目前人形机器人主要将六维力矩传感器配置在手腕(2个)、脚踝(2个)处,如果成本大幅下降,灵巧手也有可能配置(12个)。据此测算,当人形机器人年销量100万台时,六维力矩传感器年销量有望达到400~1600万套。
六维力矩传感器的技术壁垒:结构设计、标定校准、数据精确采集、解耦算法。六维力测量技术是个平台技术,根据应用场景的环境、载荷、安装、通讯、算力、动力学特性不同,在不同行业中体现出不同的产品形态。他的技术难度不是三个1维力传感器和三个扭矩传感器的简单叠加,而是一维力传感器难度的6次方,体现在:1)它的非线性力学特征明显,要考虑多通道信号的温漂、蠕变、交叉干扰、数据处理的实时性,2)六维联合加载标定的复杂性,3)解耦算法。
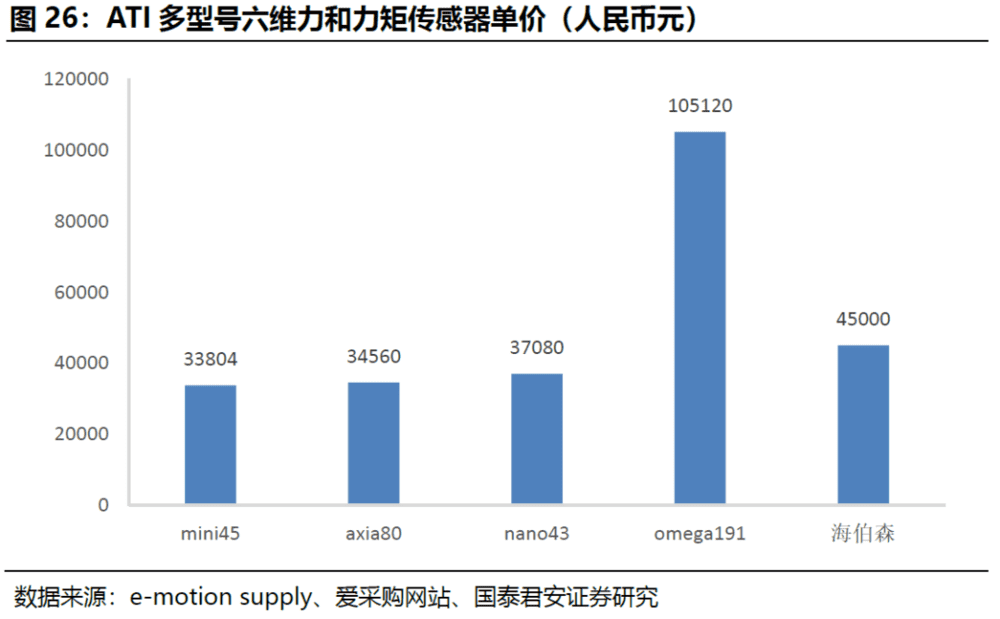
六维力矩传感器降本空间大,BOM成本中应变片占比最高,制造费用和研发费用占比高。六维力矩传感器单价昂贵,根据e-motion supply和爱采购网站数据,ATI机器人用mini45、axia80 m8、nano43型号进口价格超过3万元人民币,大型传感器omega191进口价格10.5万元。BOM成本中主要构成是应变片(占比最高,为24.2%-39.9%)、弹性体和敏感器件。此外,人工贴片费用、标定校准、研发费用占成本较高。随着市场规模扩大,成本有较大下降空间。
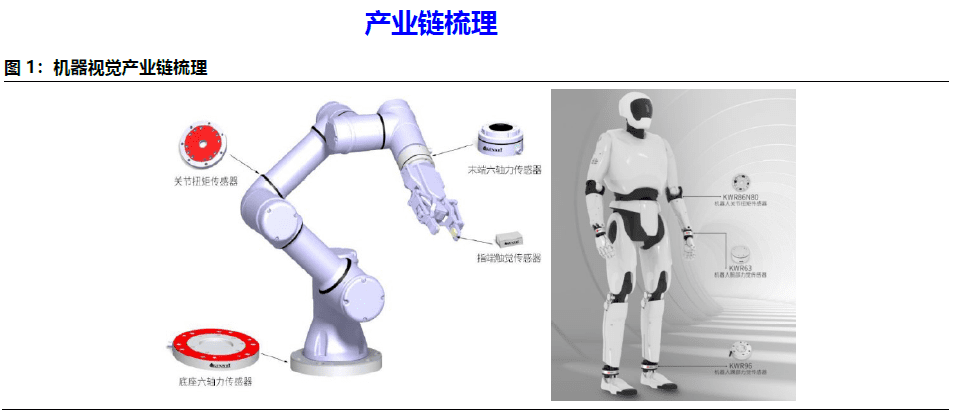
全球六维力和力矩传感器厂商主要分为欧美、日韩、国产三大阵营:
1)欧美:包括传感器制造商如ATI、Bota、Kistler等和机器人末端工具生产商如OnRobot、Robotiq等,后者主要和优傲等协作机器人厂商合作。
2)日韩:Wacoh-Tech、Robotous等,配套日本机器人厂商发那科、安川等。
3)国内企业体量普遍较小,龙头企业宇立仪器与ABB、kuka合作紧密,主要技术指标靠近国际一流水平,如:欧美品牌过载值在量程5倍左右,ATI Axia80-Ure过载值在量程8倍,宇立仪器工业级传感器M43XX和机器人专用传感器M33XX达到10倍量程。
测量准度方面:ATI通用型产品 Axia-80在满量程的2%以内,宇立仪器的产品在满量程的3%以内。国内为数不多的六维力矩传感器厂商还有坤维科技、鑫精诚、海伯森(汉宇集团参股5.52%)、蓝点触控、神源生、瑞尔特等。核心零部件方面,国内以金属应变片为主,主要供应商有中航电测。
一、力矩传感器:机器人的触觉
1. 力矩传感器:六维应力传感器壁垒最高,性能最优
力矩传感器是一种用于测量物体所受到的力矩或扭矩的传感器。力矩是绕轴旋转时的力的效果,可以是静态力矩(未产生旋转的力矩)或动态力矩(产生旋转的力矩)。力矩传感器的作用是将物体的力矩转化为电信号,从而可以进行测量、监测和控制。
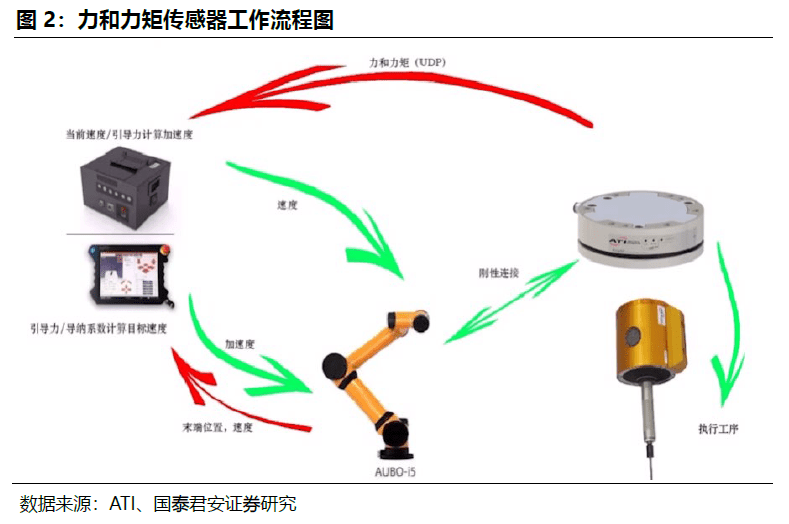
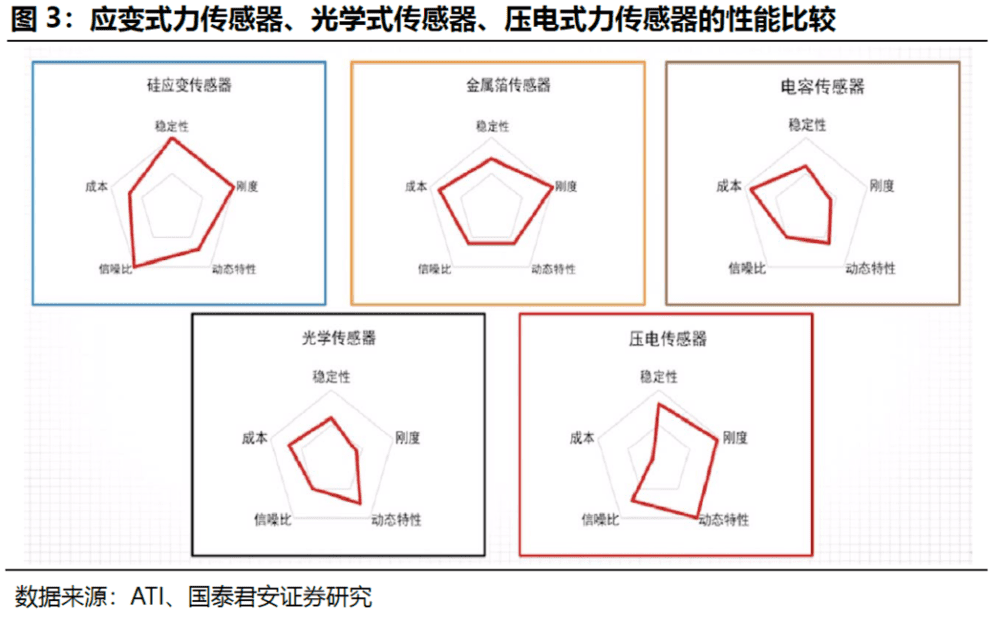
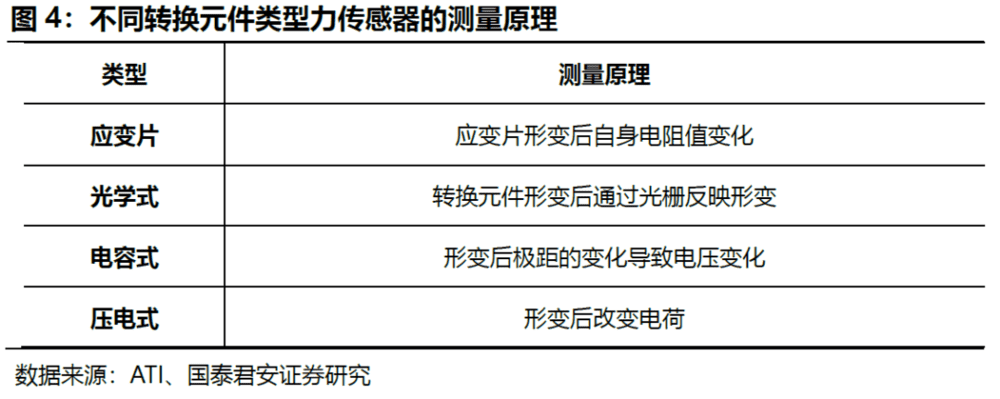
按照压力原件分类,硅应变片式力传感器性能最优,压电式转换元件主要应用在非六维力传感器中。根据转换元件的不同,传感器主要分为应变式力传感器、光学式传感器以及压电式力传感器:
1)应变式力传感器:采用的是硅应变片或金属箔,压电式传感器可分为电容和压电两种。其原理都是转换元件应变片随力敏元件同时发生形变,导致自身电阻值、电压差、光栅变化,通过电信号反应力和力矩的改变。硅应变片能够保持高刚度、稳定性和信噪比,缺点是成本较高、制作工艺复杂;
2)光学式元件:测量范围较广、抗电磁干扰能力强,但缺点是刚性偏弱,并且对环境的要求较高;
3)压电/电容式元件:拥有高灵敏度和高分辨率,并且环境适用性较强,但缺点是电路复杂,信号漂移难以抑制。
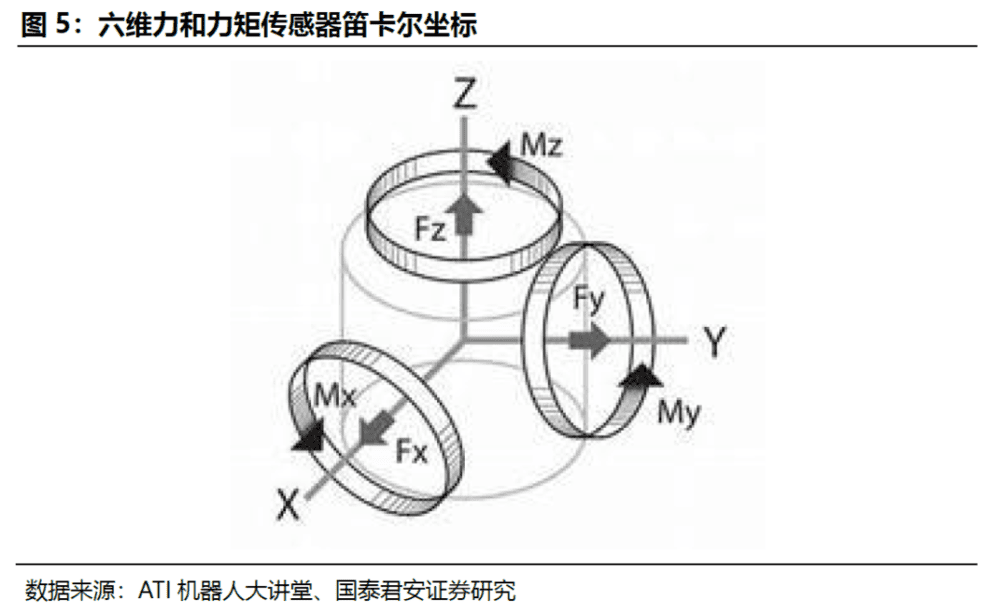
按照测量方向分类,六维力矩传感器是性能最优、技术壁垒最高的力矩传感器。按照测量方向分类,可分为一到六维力传感器。在笛卡尔坐标系中,单轴力传感器只能检测一个方向的力值,无法测量其他方向的分量;三维力传感器能够检测X、Y、Z三轴方向的垂直力,但需要保证Z轴方向与重力方向一致,否则力值测量容易引起误差。而六维力矩能够同时测量三个轴向力Fx、Fy、Fz和三个轴向力矩Mx、My、Mz,能够满足任何方向上力的检测,是功能最全面的力控传感器。
2. 六维力矩传感器准确度由串扰、精度、准度等性能决定
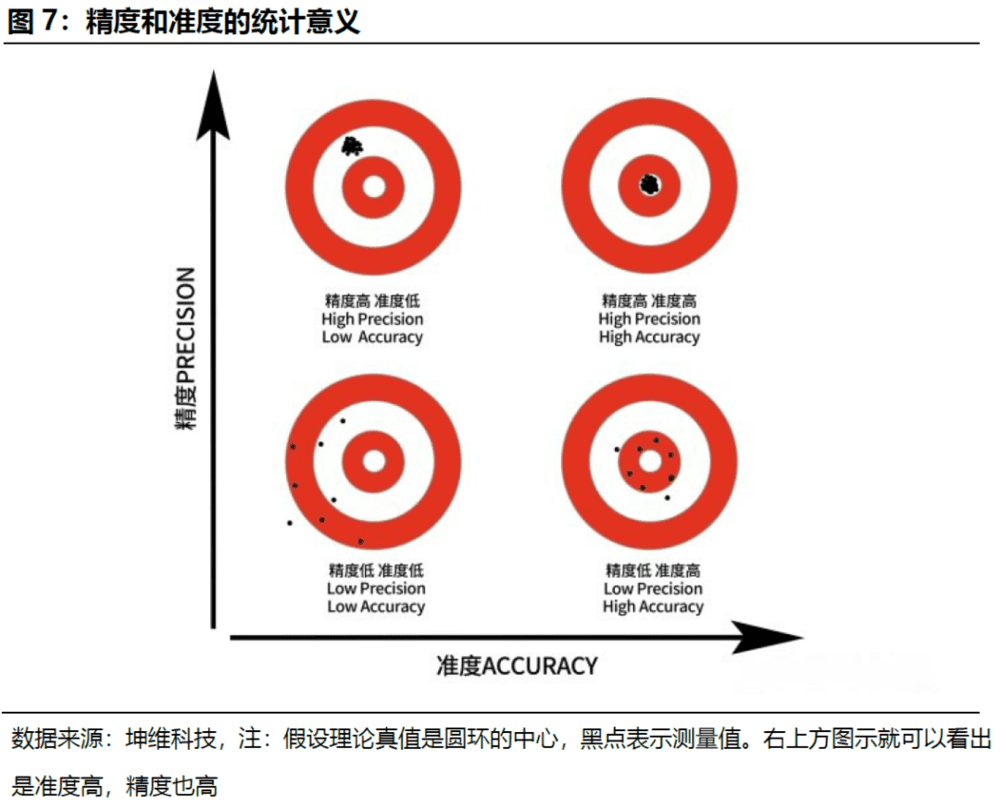
六维力传感器测量的准确度通常由串扰、精度、准度等性能决定。多维力传感器的串扰指标,大概表明产品的耦合干扰情况。为了准确描述六维力传感器的测量误差水平,通常参考精度和准度两个指标:
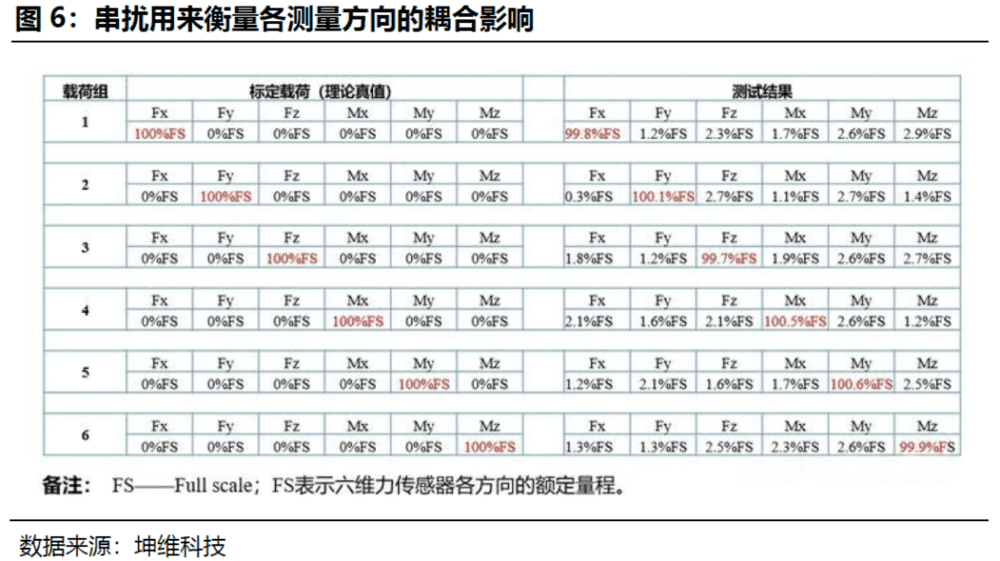
1)串扰:用来衡量多维力传感器各测量方向间的耦合影响,可以反映测量误差水平,是体现产品性能的关键指标之一。以六维力传感器为例,分别对六维力传感器的六个测量方向精确加载至各自的额定载荷,记录六个方向的测量结果,如下表格。载荷组1中,仅仅对Fx方向加载到额定载荷,并且假设加载方向和载荷值是非常准确的,所以Fx是100%FS,其它方向是0%FS。表格右侧Fy、Fz、Mx、My、Mz的测量结果就是在Fx作用下的串扰。因为此时Fy、Fz、Mx、My、Mz的理论真值都是0。 Fy、Fz、Mx、My、Mz测量结果就体现了Fx对其它五个测量方向的耦合干扰情况。多维力传感器的厂商往往选择表格中的最大串扰值作为其datasheet中的串扰指标。比如,这张表格中的2.9%是串扰结果的最大值,就可以在产品手册里写“串扰≤3%”。
2)精度衡量的是测量结果之间的重复性。其检定方法是在相同环境条件下,在额定载荷范围内,进行多次重复联合加载相同一组载荷后,计算得到的传感器测量值的标准差,并除以量程。
3)准度衡量的是测量结果与理论真值的偏离程度。其获得的方法是,对传感器进行多组多维联合加载,计算得到的传感器测量值与所加载荷理论真值之间的标准偏差,并除以量程。准度涵盖了滞后、线性、蠕变等误差因素,更能体现产品的综合性能,是多维力传感器最为核心的技术指标之一。
精度和准度的检定过程中,都需要对多维力传感器以其最高测量维度进行联合加载。例如,对于六维力传感器,每组检验载荷都必须是Fx、Fy、Fz、Mx、My及Mz的随机组合。这样获得的精度和准度,可以很清晰的评价传感器各测量方向在量程范围内的测量误差水品,比串扰指标更为实用。
例如,如果说六维力传感器产品的准度优于0.5%FS,对于Fx的测量结果,在测量过程中不论Fy、Fz、Mx、My及Mz以什么样比例和绝对值对Fx进行干扰,Fx的测量结果与理论真值的偏差在0.5%FS以内。对于其它五分方向来说也是如此。高精准度的军用六维力器,可以确保在六维度联合承载的情况下,测量值偏差在量程的 0.3%FS以内。
3. 六维力矩传感器的技术壁垒:结构设计、标定校准、数据采集、耦合算法
六维力矩传感器的技术壁垒体现在:结构耦合设计、标定校准、数据精确采集、解耦算法四个方面。六维力测量技术是个平台技术,根据应用场景的环境、载荷、安装、通讯、算力、动力学特性等需求不同,六维力传感器在不同行业中体现出了不同的产品形态。六维力传感器研发难度也非常大,它不是三个1维力传感器和三个扭矩传感器结构的简单叠加,它的非线性力学特征明显,要考虑多通道信号的温漂、蠕变、交叉干扰、数据处理的实时性,加上六维联合加载标定的复杂性,六维力传感器的技术难度可以说是一维力传感器难度的6次方。
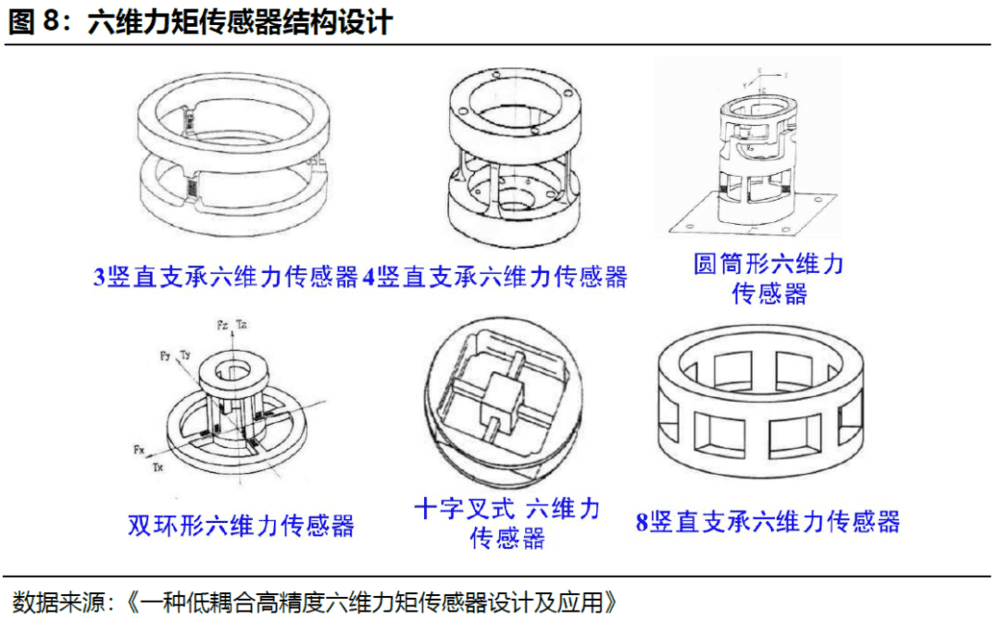
结构解耦设计:应变片式六维力矩传感器的弹性体结构设计是核心问题,传感器的结构受到其应用场合的限制,而力敏感元件的形式和布置直接影响传感器的灵敏度、刚度、动态性能、维间耦合等,很大程度上决定传感器性能的优劣。常见的结构设计包括竖梁、横梁等一体化结构以及Stewart 并联平台。竖梁结构横向效应好、结构简单、承载能力强,但竖向效应差、维间干扰大、灵敏度较低;十字横梁结构灵敏度高、易加工,易于标定,但存在维间耦合和径向效应;Stewart平台中弹性体采用复合式结构,该类传感器具有结构紧凑、承载能力强、误差不累积等优点。
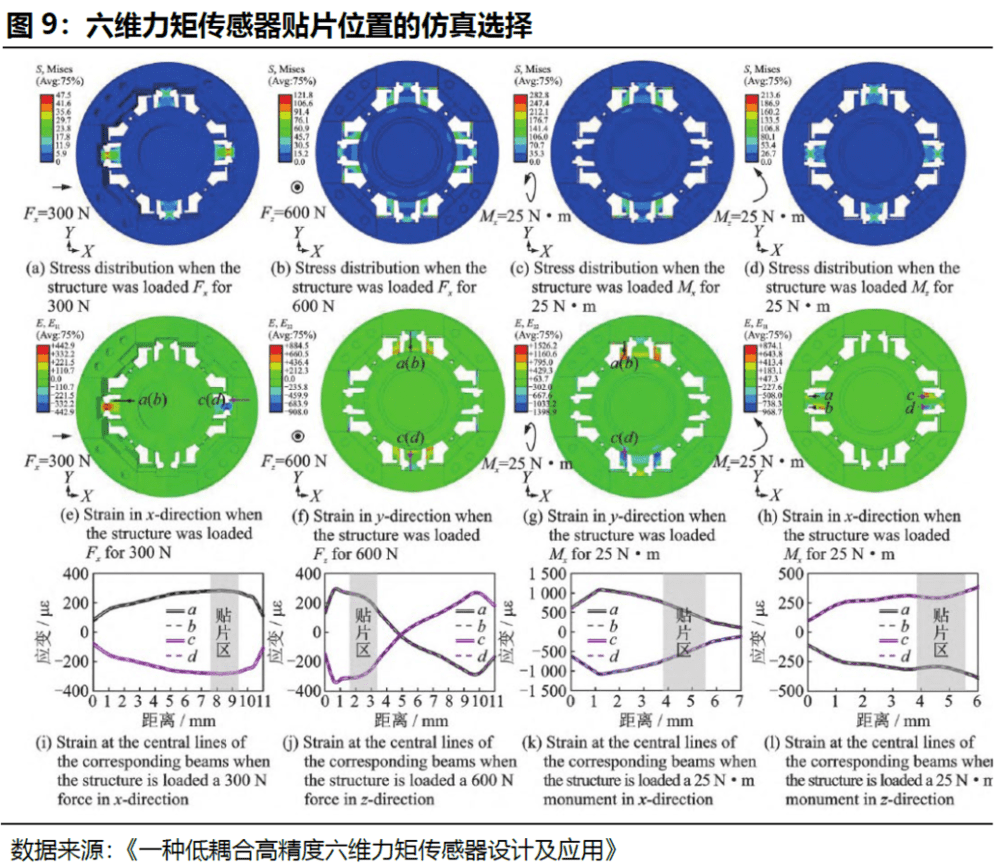
贴片位置调整和电桥组桥设计进一步消除耦合。特殊的结构设计能够大大地降低力敏元件的耦合变形,但其结构上的连续性导致结构耦合变形没有办法完全避免,因此还需要通过贴片和组桥来进一步消除耦合贴片。
在弹性轴上,首先根据仿真得到的应变和结构表面位置相关性确定应变片贴片位置,再选择合适的应变片与基底材。基底材料通常具有机械强度高,粘贴容易,电绝缘性好,热稳定性好,抗潮湿性能好,挠性好,无滞后和蠕变等特性,常用酚醛、环氧树脂、聚酰亚胺等材料。进行贴片之前,需要对应变片进行预清洗、除锈、粗化、清洗等操作,保证其表面没有锈渍、油污等异物。在贴片组桥时,需要保证应变片位置准确、表面平整、基底无气泡,电桥没有短路、断路等缺陷。
由于仿真难度高、工艺复杂、传感器内部空间狭小,贴片组桥的技术壁垒非常高,目前国内外企业在贴片环节均需要人工进行。虽然理论上可以通过合理的布片完美消除各个方向之间的耦合,但由于加工误差、贴片偏差等实际因素存在,还需要进一步标定确认传感器之间的耦合情况。
六维力传感器的解耦算法,会解耦各方向力和力矩间的干扰,使力的测量更为精准。影响六维力传感器精度的因素有很多,其中最重要的原因是维间耦合,物理学上指两个或两个以上的体系或两种运动形式间通过相互作用而彼此影响以至联合起来的现象。六分力传感器中六个通道中的每一个通道中的输入信号都会对其他通道的输出信号造成影响,因此想要一个输入只控制一个输出,不对其他通道造成影响几乎是不可能的。解耦就是要在一定程度上减小或消除耦合干扰。六维力/力矩传感器的解耦是通过数学的方法用尽可能小的误差地确定出来传感器的输入与输出的关系。
一般消除耦合或者抑制耦合可以从两个方向来做:第一种是在生产传感器之前进行的工作,一般叫做结构解耦,即从传感器的设计上来消除或者抑制耦合,该方法涉及到了传感器的制造工艺问题,这个往往比较困难,并且可能会增加成本;第二种则是利用系统性的数学模型,要矩阵解耦,运用数字信号处理的方法来减少或者消除传感器的维间耦合,该方法对制作工艺要求比较低,比较容易达到,而且还能取得很好的效果。
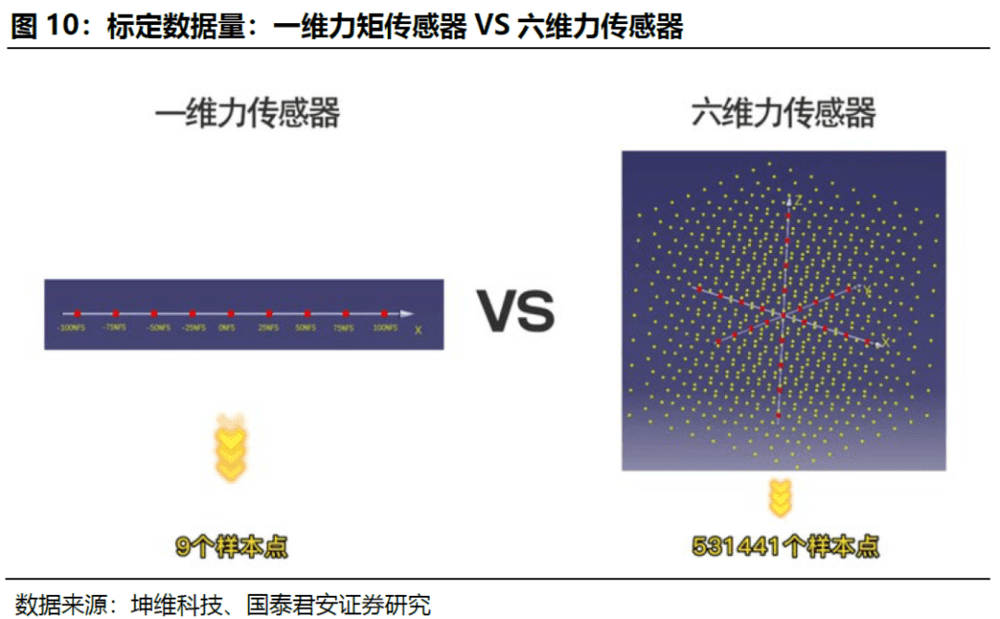
标定与检测:通过加载理论值的载荷并同时记录传感器输出的对应原始信号的方式,建立传感器原始信号和受力之间的映射关系,获得解耦算法的数学模型和参数。假设先考虑X轴方向按照±25%FS、±50%FS、±75%FS和±100%FS四个阶梯对传感器进行精确加载标定,加上空载一共有9个样本点需要标定;在六维力矩传感器标定过程中,采用三个方向的力和三个方向的力矩同时加载的方式,就叫做六维联合加载标定,需要标定的样本点就达到了9的6次方,即531441个。
在完成标定以后,通过加载已知理论真值的载荷并同时记录传感器测量结果的方式进行检测,统计、比较测量结果和理论真值的差异,获得传感器的精度和准。简单来说,标定是获得传感器固件参数,检测是获得传感器的精准度。
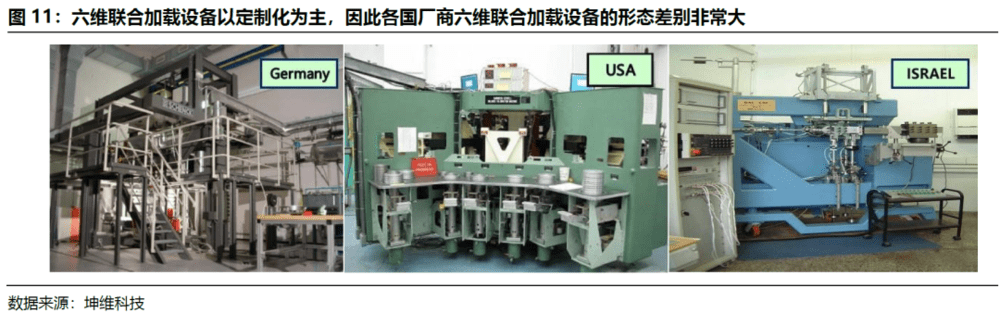
六维联合加载设备是高精度六维力传感器研发和生产的必要条件。它可以对力觉传感器实现正交三个方向力和三个方向力矩的同时精确加载,只有在传感器标定和检测过程中采用这种六维联合加载的方式,才能实现0.5%FS准度。
六维联合加载设备目前还没有标准产品可以直接采购,一般都是由六维力传感器的厂商自行研制,六维联合加载设备的研发涉及到空间光学定位、载荷位移补偿、机电一体化等多项综合技术,有上百个Know How,非常依赖工程经验,一旦某个细节考虑不周全,加载效果就会不理想,加载设备自己产生的耦合误差可能超过1%FS,这势必无法标定出高准度的六维力传感器。
二、六维力矩传感器:应用场景扩展和需求弹性
1. 工业场景:机器人装配、机器人抛光打磨的柔顺化控制
六维力测量的需求最早来自航空航天飞行器研究领域,安装在飞行器内部的六维力传感器用来测量飞行器的空气动力学特性,包括飞行器的升力、阻力、侧向力、俯仰力矩、偏航力矩和滚转力矩,逐渐应用到汽车测试、生物力学、机器人等领域。
随着机器人技术的不断进步,机器臂在喷涂、上下料、分拣、码垛、焊接等应用场景中的技术已经相对成熟。这些场景对机器臂能力要求不高,机器臂大多数时处于无约束条件下,通过轨迹规划、位置控制结合视觉识别、定位等功能即可满足基本应用要求。
对于接触丰富的非结构化场景,如在执行医疗手术、维修、装配等精巧操作任务时,环境接触特征多样,机器人与环境的交互频繁,为保证与环境安全、柔顺地进行交互并顺利完成操作任务,需要对机器臂的柔顺控制进行研究。对人形机器人、四足机器人、外骨骼增强机器人等,柔顺控制对于机器人复杂地形通过能力、人机柔顺交互能力等同样关键。
机器人抛光打磨、机器人装配市场,人工替代刚刚开始。在工业制造中,很多零件需要在焊接、铸造、成型或加工后进行后处理,包括打磨、抛光和去毛刺。例如汽车的发动机缸体、缸盖、变速箱壳体、汽车轮毂,卫浴五金,航空与能源行业的发动机叶片、涡轮叶片,3C行业的笔记本电脑、平板电脑、手机等。
目前国内大部分工件去毛刺加工作业大多采用手工,或者使用手持气动,电动工具进打磨,研磨,锉等方式进行去毛刺加工,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题。同时,打磨会产生很大的粉尘,对人体健康造成危害,企业面临越来越严峻的招工的问题,越来越多企业开始采取机器人加上电动或者气动工具进行自动化打磨。
与人工打磨相比,机器人打磨能提高效率和产品良率,降低成本。但是,由于机械臂刚性、定位误差能因素,采用机器人夹持电动/气动工具的方式,对不规则毛刺和不规则形状工件的打磨容易出现断刀或者对工件造成损坏。因为要精确确定机器人运动路径,编程复杂。因此,加工的工件品质不一,公差不同,难以获得稳定的工艺效果。机器人可以迅速而精确地适应加工材料或零件的表面轮廓和连贯性,可以采用图形变成界面、压力控制和变速控制功能为机器人的机加工打开应用空间。
为了解决加工中的实际问题,机器人厂家采用六维力矩传感器系统开发了力控软件,四大家族已经形成自己的力控打磨技术路线。就ABB、库卡的力控打磨套件产品分析,目前主要是六轴力传感器反馈控制和自适应打磨头两种方案。以ABB机器人为例,在类似汽车焊缝打磨应用中,ABB机器人基于机械手和环境间的交互作用,将环境力引入控制回路,提高机器人和外界可控的接触力和接触的稳定性,使得机器人可做接触运动而不发生碰撞停机现象。

2. 人形机器人:实现关节、手腕、灵巧手的力控感知
在人形机器人领域,大致分为以下三个方向做硬件层面的力传感器与力反馈测量:
1)电流环:通过电机的电流闭环做力闭环反馈控制,适用于直驱电机或者带小减速比的应用场景,如小型阻抗控制的人机交互的机械臂和小型四足,MIT Cheetah等;
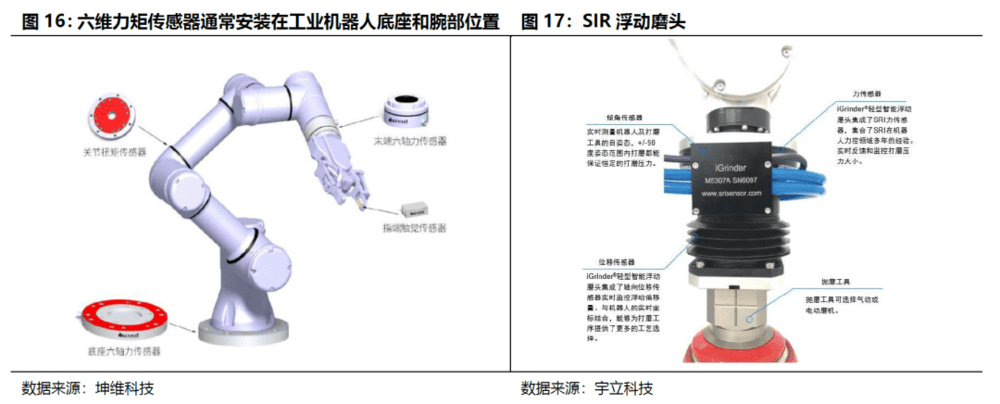
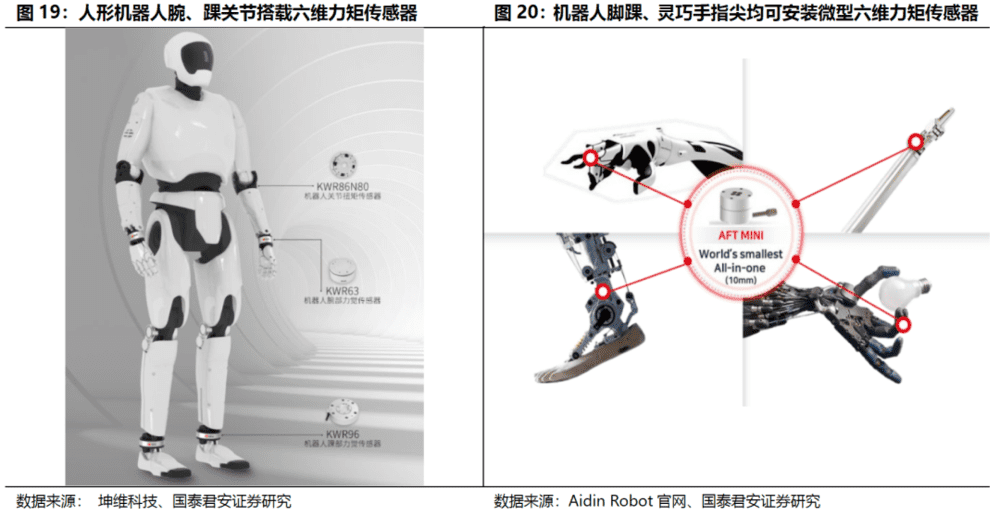
2)力/力矩传感器: 直接使用六维力/力矩传感器。在人型机器人之中,通常将力/力矩传感器安装在:a. 脚掌与踝关节之间;b. 机械手与腕关节之间;
3)弹性体:设计弹性体集成在驱动器对外输出端之前,往往会形成SEA,通过弹性体形变测量力矩,往往适用于人型机器人集成度较高和驱动器输出力矩要求较高的应用场合。
具体到力/力矩传感器的方案,人形机器人的需求有以下几个环节:
1)主体的力控:在平面路面上工作的人形机器人可不采用六维力传感器,但在面对复杂路况的情况下,人形机器人需要采用六维力传感器,主体的力控方案根据实际需求的不同有多种解决方案,a. 主体放置六维力传感器,成本高但检测精度、信息数据量最好。b. 主体不放置六维力传感器,通过腿部关节力矩,拉压力传感器反推主体受力情况。c. 主体放气囊,放气压传感器,精度低。d. 主体放拉压力传感器。以上四种方案,具体采用哪种方案取决于使用场景和成本考量。
2)关节的力控:a. 旋转关节,在减速机外部放置一个力矩传感器。b. 直线关节,根据电机情况,如果是旋转电机,放扭矩力控传感器;如果是直线电机,在推杆上放拉压力传感器。
3)手腕力控:腕部需要的自由度根据机器人的工作性能要求来确定。例如,机器人在执行抓取动作时,首先是视觉传感器的作用,测绘目标的三维形状以及周边环境,位置控制环计算得出最优的路径达到目标位置。灵巧手的传感器(可以是激光雷达,也可以放置视觉传感器),用于二次定位,再进行抓取动作,发生碰触后,力控的信号发生变化就说明已经抓到目标对象,再重新调整位控。遵循位控接近——力控感知——力控信号出现后重新位控的流程。
4)灵巧手力控有两种技术路线:a. 在直线电机推杆上放拉压力传感器;b. 在手部内放置触觉传感器,这个方案更优。
3. 六维力矩传感器市场需求弹性测算
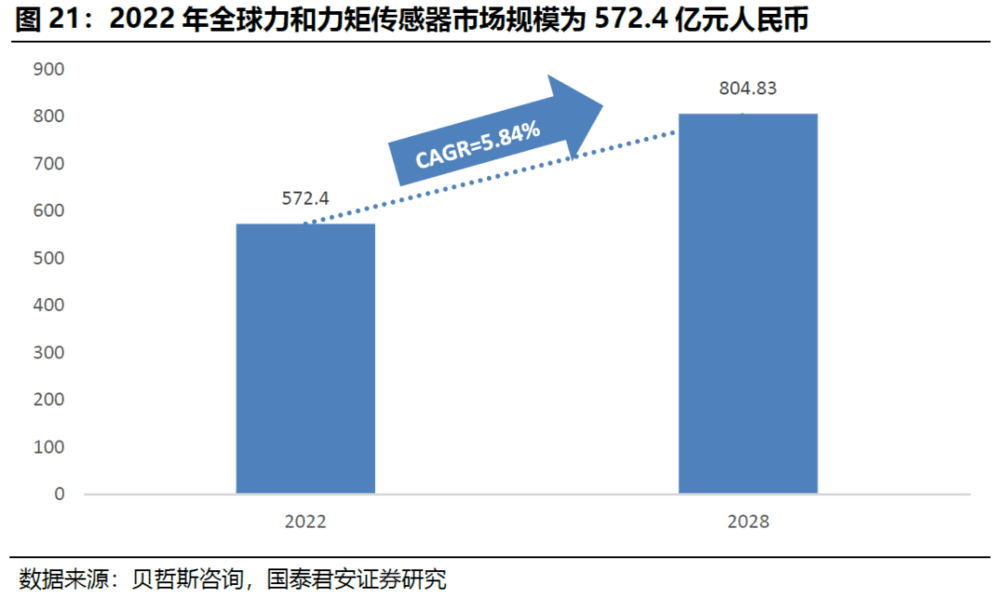
2022年全球力和力矩传感器市场规模为572.4亿元人民币,2022-2028年CAGR预计为5.84%。根据贝哲斯咨询数据,2022年全球力和力矩传感器市场规模为572.4亿元人民币,预计2028年全球市场规模将增长至804.83亿元人民币,2022-2028年CAGR预计为5.84%。
1)工业机器人对六维力矩传感器的需求预测:
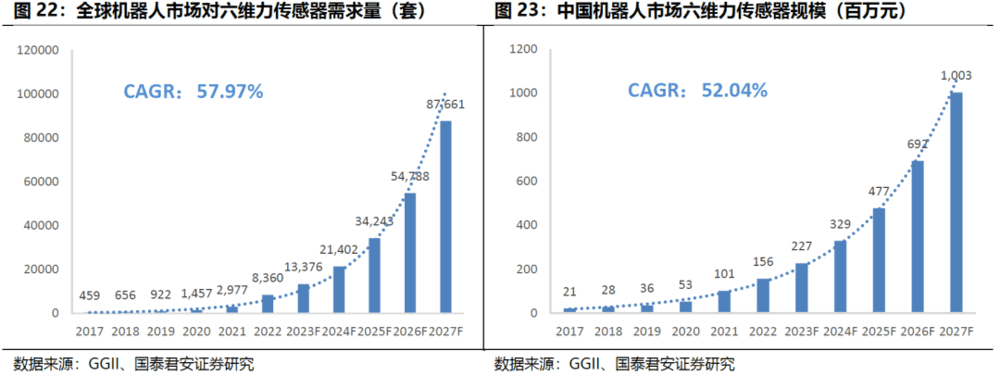
目前六维力矩传感器主要应用于汽车碰撞测试,航空航天领域,2022年中国六维力矩传感器销量/市场规模8360套/2.39亿元人民币,随着机器人抛光打磨、精密装配等领域的应用得到拓展,预计2027年中国市场销量/规模有望突破42000套/15亿元,CAGR分别为57.97%/52.04%。
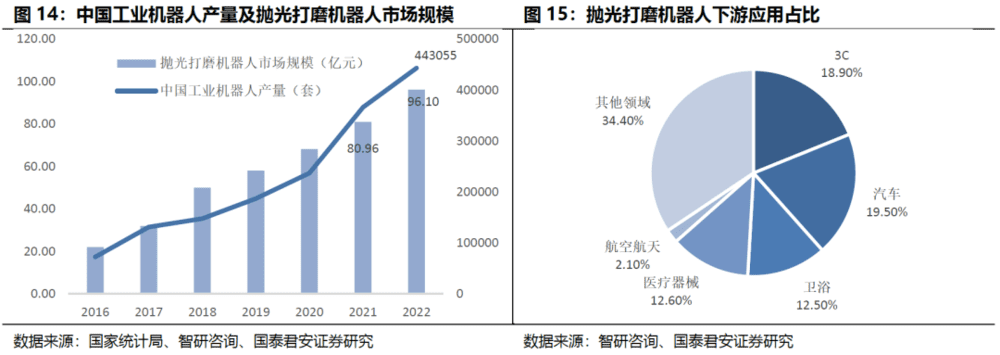
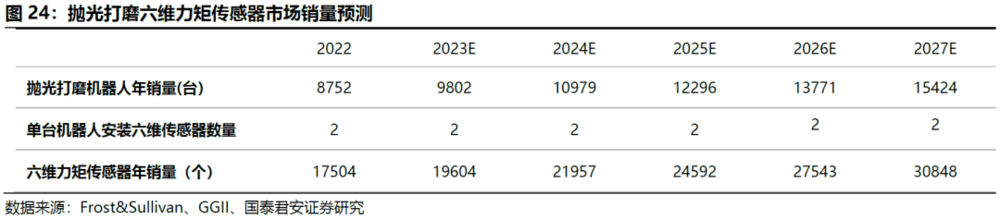
2022年中国抛光打磨机器人产量为3860台,安装量为8752台,进口占比55.9%,市场规模96.1亿元/yoy+18.7%,3C、汽车领域分别占18.9%和19.5%。按照每台抛光打磨机器人安装两个六维力矩传感器计划,预计2027年中国抛光打磨机器人对六维力矩传感器的需求为3.0848万个。
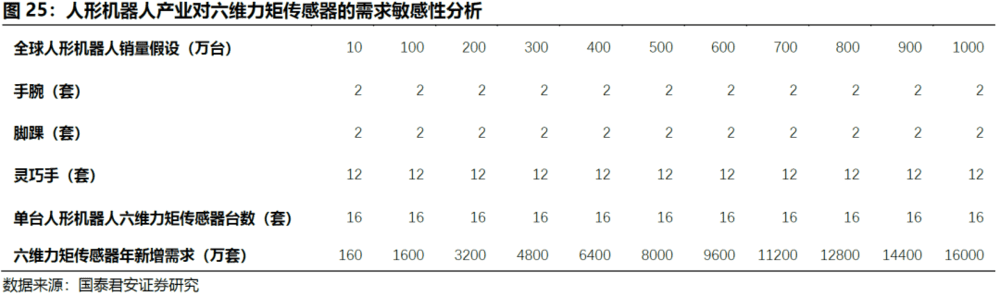
2)人形机器人市场六维力矩传感器需求进行敏感性分析:
当人形机器人销量100万台时,六维力矩传感器的年销量为400~1600万个,当人形机器人年销量1000万台时,六维力矩传感器的年销量为4000~16000万个。核心假设如下:
a. 人形机器人年销量在10~1000万台之间;
b. 目前市场上人形机器人通常在手腕、脚踝处安装六维力矩传感器共4个,因时机器人最新灵巧手产品单手搭载6个六维力矩传感器,因此理论上,单台人形机器人可搭载六维力矩传感器的数量为16套。出于成本的考虑,目前灵巧手搭载六维力矩传感器的方案较少,手腕和脚踝处安装六维力矩传感器的方案较为普遍。
4. 成本拆分:六维力矩传感器存在大幅降本空间
六维力矩传感器单价昂贵是六维力矩传感器无法广泛普及的重要原因之一。六维力矩传感器单价昂贵,根据e-motion supply和爱采购网站数据,ATI旗下机器人常用的mini45、axia80 m8、nano43型号产品进口价格全都超过3万元人民币,大型传感器omega191进口价格在10.5万元。国产厂商海伯森产品标价为4.5万元,FUTEK实验用大型六维力传感器价格在10万-20万之间。
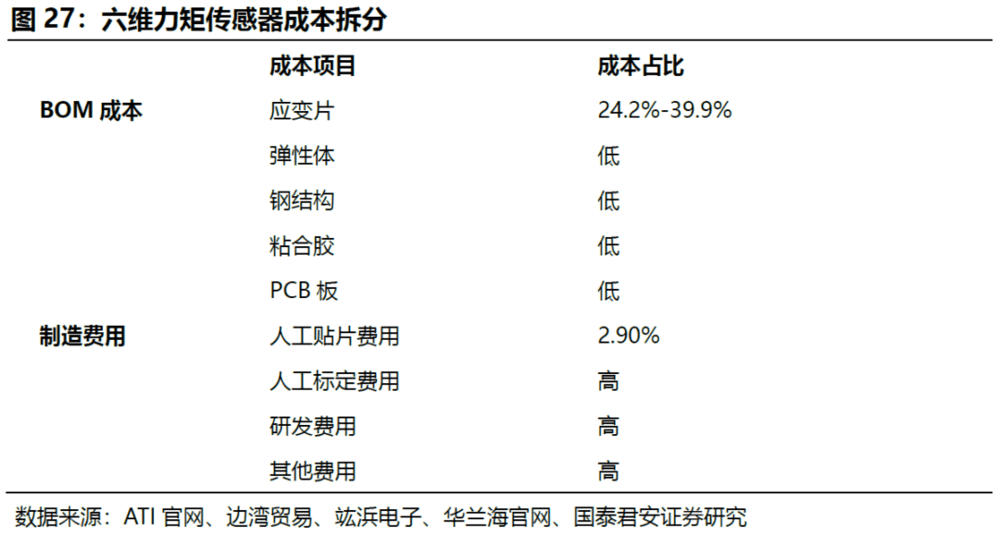
六维力矩传感器成本:BOM+贴片+研发+其他,应变片成本占比最大。应变片式六维力矩传感器性能最优,我们以此类传感器为例分析其成本结构:
1)BOM:弹性体(特种钢材)+应变片(硅、金属)+PCB板+粘合胶(环氧树脂等)。海外高端力传感器主要使用硅应变片:根据边湾贸易和竑浜电子数据,在分别除去运、税费后,硅应变片龙头KYOWA的KFWB型号应变片和HPI的HFP-12-063ZPW应变片的价格分别为696元/片和1148元/片。国内制造商普遍使用较为便宜的金属应变片:根据爱采购网站数据,华兰海产品8-10元/片,中航电测产品10.75-17.86元/片。弹性体、PCB板以及粘合胶价格相对较为便宜。
2)贴片:目前国内外六维力矩传感器厂商都依赖人工在显微镜下完成手动贴片、焊接操作。华兰海外售人工贴片服务,根据其官网数据,一台传感器的贴片人工费用为1000元/台左右。
3)研发:弹性体设计、贴片仿真、标定检测、解耦算法以及六维联合加载设备的技术开发都需要大量的研发成本。
4)其他:软件算法、六位联合加载设备制造(固定成本)与设备维修、折旧等成本。
BOM成本中应变片占比最高,制造费用和研发费用摊销高。按照ATI最新产品Axia80测算,其售价为34560元人民币,其弹性体共3根横梁,各搭载4个、共计12个硅应变片,成本在8352~13776元,占比24.2%-39.9%;人工贴片成本占比2.9%。除去剩余价格较为便宜的BOM材料以外,研发费用是六维力传感器成本的主要来源。
三、六维力矩传感器供给格局:国内龙头厂商达到世界一流水平
1. 六维力矩传感器形成欧美、日韩、国产三大阵营
全球六维力和力矩传感器厂商主要分为欧美、日韩、国产三大阵营:
1)欧美地区厂商:可分为传统传感器制造商如ATI、Bota、Kistler等和全球知名机器人末端工具生产商如OnRobot、Robotiq等,后者主要和本地区协作机器人厂商合作,包括优傲机器人、达明机器人等。
2)日韩厂商:六维力和力矩传感器厂商主要有Wacoh-Tech、Robotous等,主要配套本地区机器人厂商发那科、安川等。
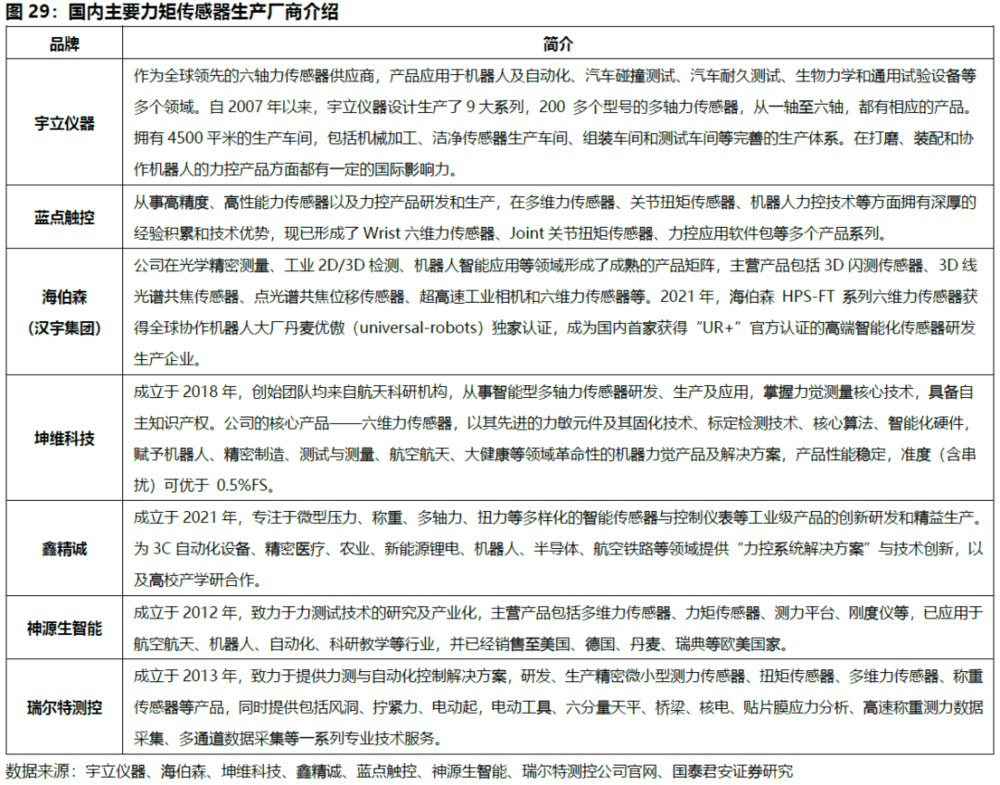
3)国内厂商:以宇立仪器为代表,已经在全球市场开始和欧美、日韩厂商同台竞技,国内厂商还有坤维科技、鑫精诚、海伯森、蓝点触控、神源生智能、瑞尔特测控等。
海外厂商发展路径:从力矩传感器设备制造商到力控、测量解决方案集成商的转变或将成为全球力矩传感器企业发展趋势,相比力矩传感器等零部件生产,各个行业不同场景下的力控和测量的集成方案市场规模要更大。
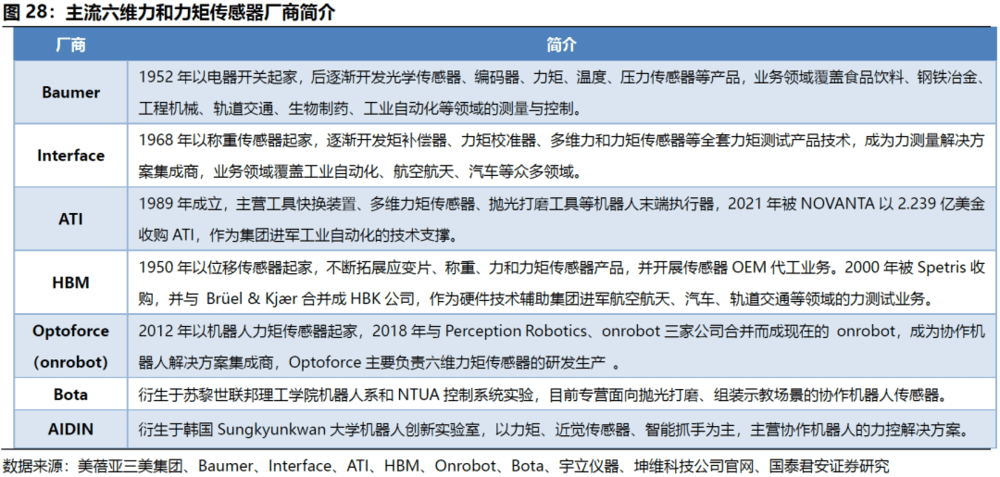
以测量解决方案集成商Interface、Baumer为例,双方都是以称重、力矩、温度等传感器和应变片等零部件的制造技术起家,随着工业技术的不断发展,放弃了零部件制造商的定位,在原有技术的基础上完善力矩、压力、温度、加速度等各项指标的测试、补偿校准、控制技术与产品线,成为决解方案集成商,并不断向工业自动化、航空航天、建筑、汽车等各个领域拓展业务。而ATI、HBM、Optoforce等力矩传感器制造商则是被更大的解决方案集成商所收购,成为集团内的硬件
技术支撑:HBM自成立以来专注力矩、称重等传感器和应变片等零部件制造,2000年被Spetris收购,并与 Brüel& Kjær合并成HBK公司,作为硬件技术辅助集团进军航空航天、汽车、轨道交通等领域的力测试业务;Optoforce在2018年与PerceptionRobotics、onrobot三家公司合并而成现在的onrobot,成为协作机器人解决方案集成商;ATI在2021年被NOVANTA以2.239亿美金收购,作为集团进军工业自动化的技术支撑。
宇立仪器、Bota、Aidin等新兴企业的发展历程同样顺应了上述发展历史:宇立仪器、坤维科技在成立后,迅速将原有的六维力传感器技术从汽车碰撞假人和航空航天领域移植到工业自动化、医疗等业务领域,往力控解决方案集成商的方向发展;而Bota、Aidin均衍生于大学的机器人实验室,在突破多维力和力矩的测量技术之后,都选择了从协作机器人专用六维力传感器制造商向力控集成商的方向发展。
国内厂商发展路径:2007年,宇立仪器成立,成为我国唯一具有汽车碰撞假人多轴力传感器生产能力的企业,将多维力传感器引入汽车耐久试验领域,与上汽、大众等车企展开合作,解决了这个领域卡脖子的问题。业务领域从汽车碰撞假人拓展至工业、手术机器人等,同时进军机器人智能打磨行业。
坤维科技2018年以航空航天六维力矩传感器技术起家,主营工业自动化、医疗、航空航天、工业测试等领域的力控解决方案。宇立仪器拥有六维力和力矩传感器机械加工、贴片、焊接等全流程完整自主知识产权,生产工艺获得CNAS认证,同美国规范一致。
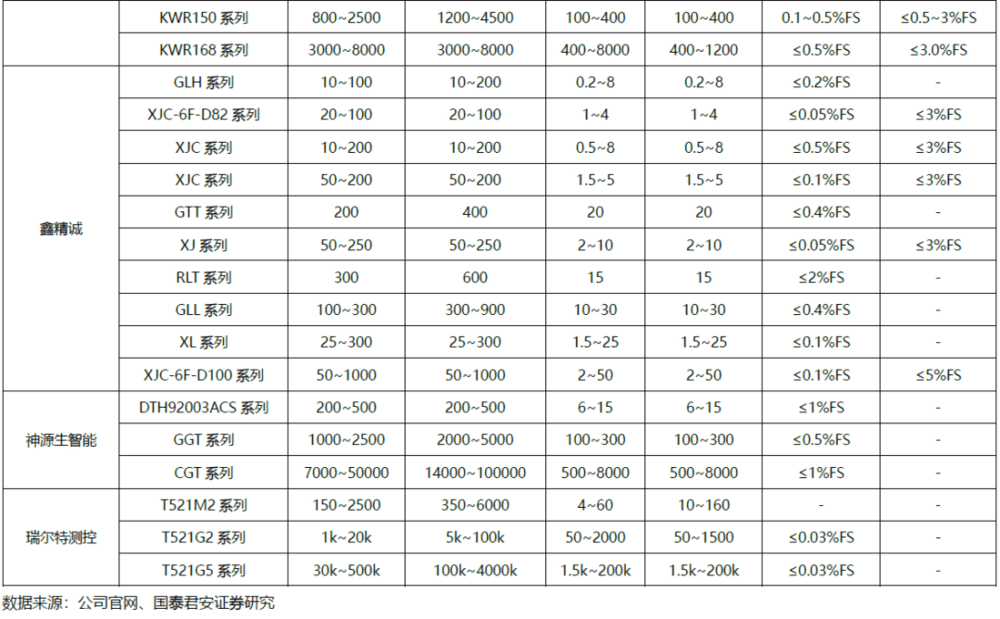
2. 主要厂商产品覆盖范围对比:产品系列有待进一步完善
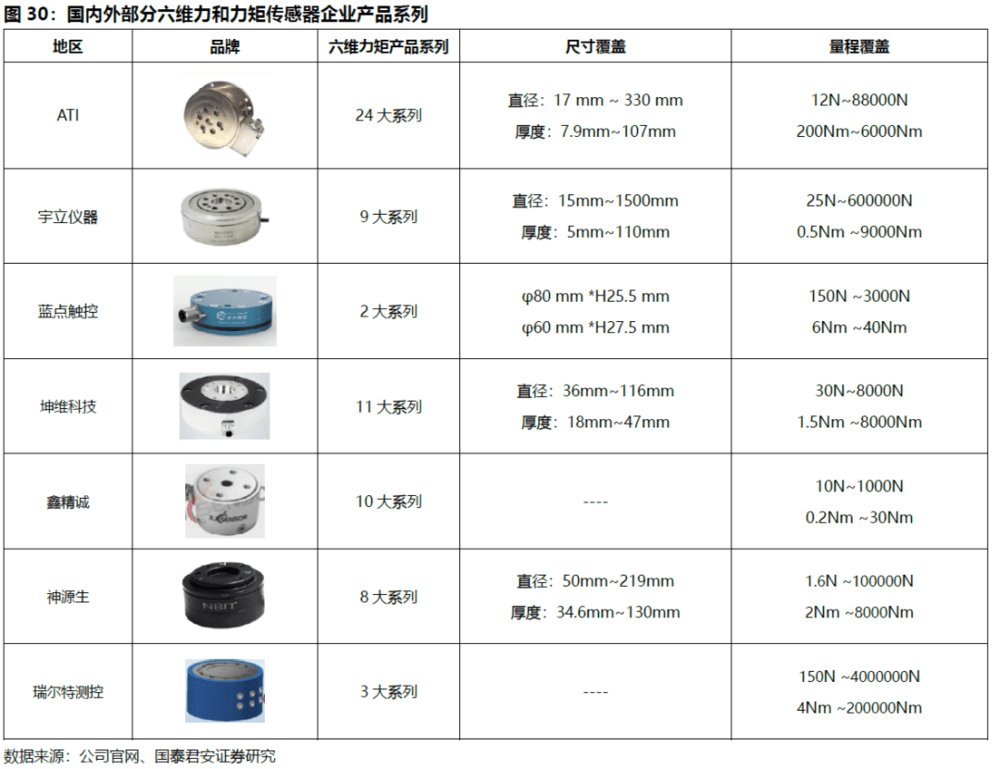
国内外龙头厂商的产品覆盖范围和量程覆盖范围基本在同一水平。ATI:力矩传感器产品系列众多,尺寸覆盖7.9mm~107mm(厚度)、17 mm~330mm(直径),量程覆盖12N~88000N、200Nm~6000Nm。宇立仪器(SRI):一共设计生产了9大系列,300多个型号,量程范围从25N~600000N,0.5Nm~9000Nm直径15mm~1500mm,厚度5mm~110mm。国内其他厂商的产品系列有待进一步完善,量程覆盖范围基本在同一水平。
3. 主要厂商产品性能对比:与国际龙头存在差距
国产六维力/力矩传感器与海外厂商传感器在灵敏度、串扰、抗过载能力及维间耦合误差等方面仍存在差距。
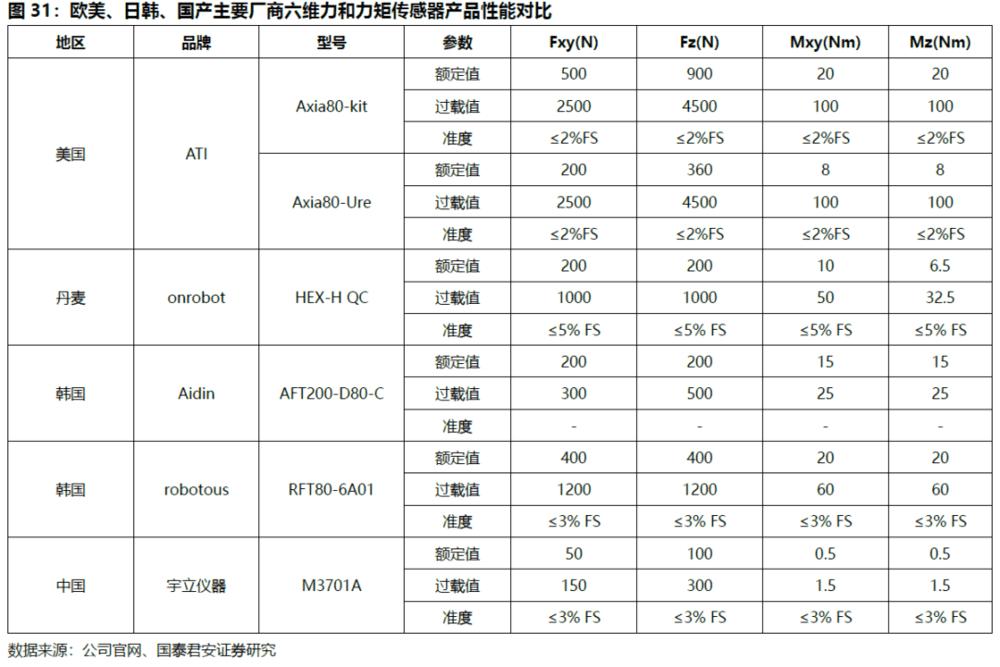
1)过载值:六维力传感器的安全性通常用过载值衡量,被若测力和力矩超过量程,则输出端只能输出最大量程,而被测力和力矩达到过载值时则会损坏传感器。欧美主流产品在三轴F/S(力和力矩)均为量程5倍左右。ATI产品普遍采用世界领先的硅应变片技术,产品刚性高,Axia80-Ure在三轴力矩过载值超过量程8倍。韩国robotous主要采用电容式技术,产品刚性一般,过载值在量程3倍左右。宇立仪器M43XX工业级传感器和M33XX机器人专用传感器的过载保护值达到10倍量程,并且分别提供矩阵解耦和结构解耦功能,能够提供稳定而准确的测量能力。
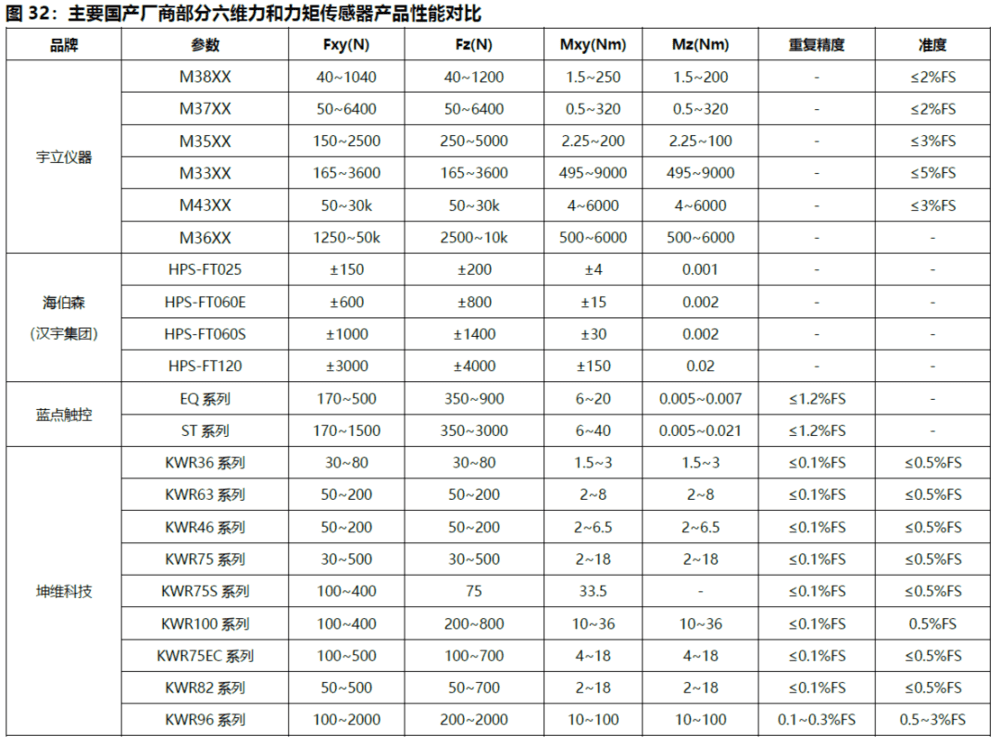
2)测量准度:ATI通用型产品 Axia-80在满量程的2%以内,宇立仪器、robotous产品在满量程的3%以内。宇立的M38XX高精度传感器测量精度在0.2%量程以内,适合精密装配与医疗机器人。国内厂商的准度基本可以实现3%以内,少数在5%以内。
本文来自微信公众号:国君产业研究(ID:industryRCofG),作者:肖群稀、鲍雁辛