
出品 | 虎嗅汽车组
作者 | 王笑渔
编辑 | 周到
头图 | 视觉中国
“司机地位低”的言论,出自于理想汽车创始人李想在去年的一场直播。
不过,这一言论确实被断章取义了。直到李想在微博上发文回应,事件才告一段落,他当时写到:“在很多大型车的产品定义里,首先以照顾后排的老板为目的,司机的重要级别是最低的,所以可以牺牲司机的舒适性和体验。我们的产品定义不这么做,我们认为司机很重要,不能干扰司机,通风、按摩也要给到司机。”
然而,一个不争的事实的是,理想汽车诸多产品亮点是围绕着,“女人和孩子开心了,我就很开心”的理念来进行延展。比如,理想L7的“皇后座”,理想L9的“冰箱”和“彩电”,无一例外都是服务于二排乘客的配置。“奶爸”除了赚钱养家,其余的任务似乎就剩下认真开车了。
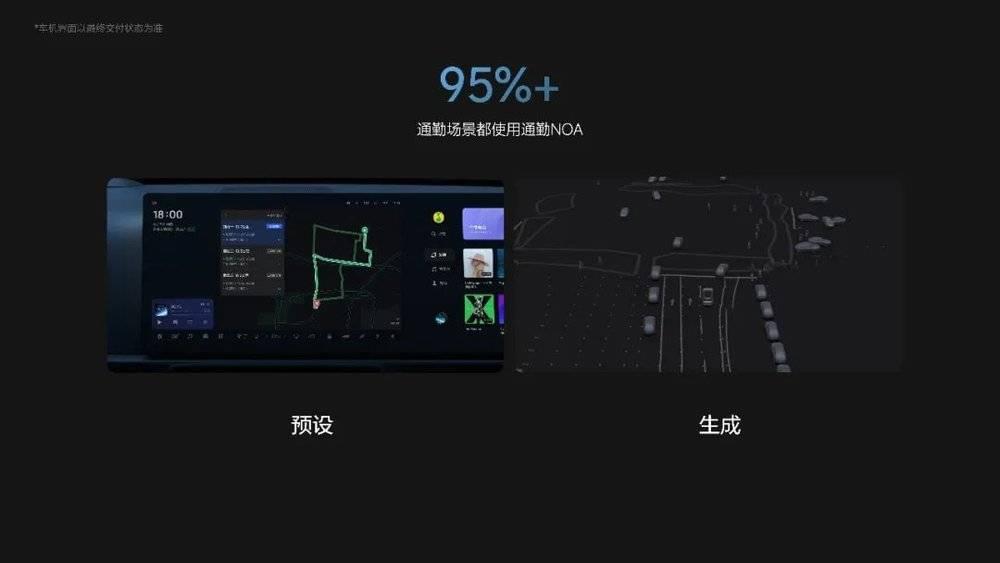
但现在,理想终于打算让驾驶员们开心一下了——在6月17日的家庭科技日上,理想汽车宣布本月即将开启城市NOA(导航辅助驾驶)内测。并且还宣布下半年,将向用户开放通勤NOA功能,让用户拥有属于自己的“专属电梯”,每天上下班更轻松、更便捷。

前两天,虎嗅汽车受邀在“地狱级”路段北京望京,试驾体验了理想的城市NOA城市功能。最直观的感受就是——理想给我请了一个代驾司机,但还属于刚上岗不久的状态。
AI司机初来乍到,地狱难度直接整上
如果仅用接管率来作为评分标准,那么理想的城市NOA只能说刚刚及格。但如果把使用场景的因素考虑进去,理想NOA能过的“关卡”,小鹏和华为都不一定能拿到满分。

这次,我们体验的场景是北京的望京核心区域。作为北京最繁华的区域之一,望京的开车规矩,就是没有规矩。交通拥堵和路况复杂程度令不少网约车师傅都望而却步。
路边的违停车辆、逆行的外卖小哥、横穿的行人以及随意、摆放的施工路障等,都为“AI司机”的大考增加了难度。

一次紧急接管
从望京到顺义,经过77个路口、40公里路程,但我碰上了几乎所有的极端场景。其中,有两次接管都是因车辆违章横穿双黄线调头所致,有一次接管则是外卖小哥别停前车所致,还有一次施工道路水马侵占车道所致。
我愿将“望京停车场”、“广州城中村”、“深圳华强北”、“上海南浦大桥”称之为中国四大“智驾炼狱”。

另一次接管
第一关,“AI司机”要学会“蛇皮走位”。
望京的朋友都说,“这里罚款比停车费划算”。在几乎所有的右侧车道上,都停满了违停车辆。即便是你借道完成右拐之后,下一条路上的右侧车辆依旧停满了车。
如果是依赖高精地图的城市NOA功能,到了望京可能会被违停车辆逼疯掉。因为,依赖高精地图的方案更像是“盲人走盲道”,车辆的违停就好比是盲道被占。
从理想城市NOA的表现来看,它更像是用人眼看路,用人脑思考。像最基本的,有违停车辆占道场时,理想城市NOA能够丝滑地做到绕行;像无保护右转的场景中,在有右侧违停车辆时,它会倾向于选择右侧第二条车道进行右拐;像右拐弯过程中,它也会及时判断左侧是否有来车以及下一条道路右侧仍有违停车辆,如果都没有则会迅速进入中间车道。
第二关,“AI司机”要学会看红绿灯。
对于人来说,看红绿灯是三岁小孩都会的技能。但对于自动驾驶系统而言,其难度并不在于识别红灯还是绿灯,而是将识别到的红绿灯信息与当前行驶的道路进行绑定,俗称“绑路”。
因为几乎每个路口的红绿灯位置、形状、高度都大相径庭,很难用人为写入的规则,完成红绿灯路口的通行。如果是通过高精地图以及V2X的方案,系统可以提前预知红绿灯信息。这就相当于“考试的时候有人给你写小纸条”,不用你动脑筋思考,直接写答案就行。
从理想城市NOA的表现表现来看,它能够在绿灯亮起后的1秒钟之内完成起步,全程体验下来并没有出现后车按喇叭催促的情况。不过,在遇到红灯减速停车的过程中,点头情况略微明显。后续,算法团队与整车工程团队可能需要在细节体验上着重配合优化。
一个细节是,如果前方大车在路口完全遮挡住了红绿灯,理想城市NOA的可视化界面上是不会显示红绿灯信息的。当前方大车开始起步时,它会先非常缓慢地进行跟车,在确定是绿灯之后再继续加速行驶。这基本能说明,从红绿灯信息的获取上,理想已经彻底摆脱高精地图。

第三关,“AI司机”需要学会博弈。
在遇到各类的博弈场景时,理想城市NOA虽然可能会与较大明显的制动和避让,但大多数的时候不会完全刹停等待对方通过,而是慢慢地找机会通过。
与汇流车辆博弈时,它会在旁车阻挡路径的一瞬间进行大力的制动,但同时会缓慢开始加速。在保持安全距离的同时,像人一样往前慢慢地“挤出”可行驶区域。
与行人的博弈,也是类似。通常发生在拐弯的场景中,车辆需要与避让斑马线上的行人。但如果完全停下来让行人走完,很可能一波走完接着又来一波。所以,理想NOA有时候会通过蠕行+轻微调整方向盘的方式,一边避让行人一边往前慢慢挪,等到斑马线上出现空挡后,迅速驶离。

总之,理想城市NOA让人感受到,它开始像人类一样观察、像人类一样开车。而这要感谢AI大模型的帮助,让原本线性的成长变为跃升式,让理想实现了“弯道超车”。
“微博之王”又赢麻了?
理想汽车,并不是业内第一家自研自动驾驶,也不是第一家量产激光雷达和大算力芯片,更不上第一家提出“重感知轻地图”方案。但理想确实是第一家在北京落地“无图”城市NOA功能,并且今年年底扩张100城的口号也是理想喊得最响亮。
之所以能追得这么靠前,且跑得如此之快,与路径的选择有着密不可分的关系。
现在很多率先交付城市NOA类功能的车型,都是采用的高精地图的方案,并且在规划控制层面大量基于人写的规则。但在复杂多变的城市场景中,总会有高精地图无法覆盖和无法及时更新的区域,也总会有事先没有预料到的场景。
理想这招“后发制人”,则越过高精地图方案,直接上AI大模型。
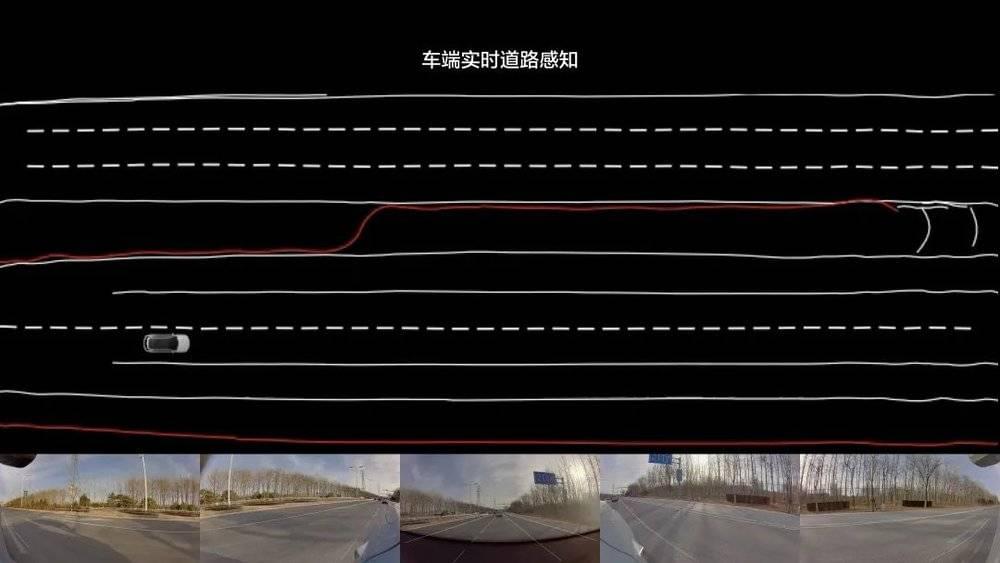
首先,理想城市NOA要实现不依赖高精地图,其核心是采用BEV(Bird’s eye view,鸟瞰图)大模型,来实时感知和理解环境中的道路结构信息。业内对于这套BEV感知算法的讨论和量产都已经很多了,这里就不多赘述。
但在一些城区复杂的路口,仅通过BEV大模型来进行感知依然不够稳定。例如在一些跨度较大的路口,通行车辆较多,传感器视野容易被遮挡,导致车端实时感知的结果会丢失局部的信息,显得不够稳定。
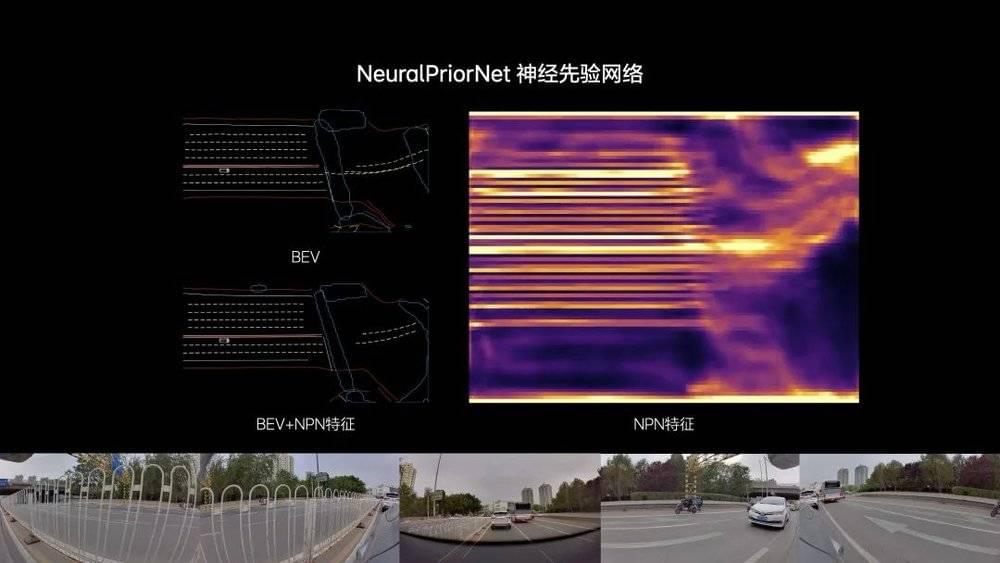
针对这类复杂路口,理想的做法是使用自研的神经先验网络(NeuralPriorNet),简称为NPN网络,提前进行路口NPN特征的提取。当车辆再次行驶到该路口时,将之前提取好的NPN特征拿出来,与车端感知大模型的BEV特征层相融合,就得到了完美的感知结果。

其次,在“看红绿灯”这件事上,理想训练了一个端到端的信号灯意图网络(TrafficIntentionNet),简称为TIN网络。不需要人为设定任何规则,甚至不需要识别红绿灯的具体位置。只要将图像视频输入给TIN网络模型,网络就能直接给出车辆现在该怎么走的结果——左右转、直行或停止等待。此外,理想还通过学习人类司机在路口对信号灯变化的反应,来训练TIN网络模型。
接着,面对道路上可能会出现的通用障碍物,比如施工路障、遗撒物体、卡车后斗伸出的货物等,理想使用Occupancy网络,来精准地识别它们的边界和类型。通过对Occupancy网络“投喂”大量训练里程,来提升识别的内容和准确性。

像人一样看路还不够,还得让AI像人一样操控。
为了让“AI司机”在驾驶决策和轨迹上,也像人类司机一样做出合理的判断,理想在规控算法上应用了模仿学习的方法,通过大量驾驶员的驾驶行为进行训练,让城市NOA的决策和规划,在保证安全、符合交通规则的前提下,做出更像人类驾驶员的判断。
像前文提到的,从右侧第二条车道进行右拐,就是一种拟人化的表现。
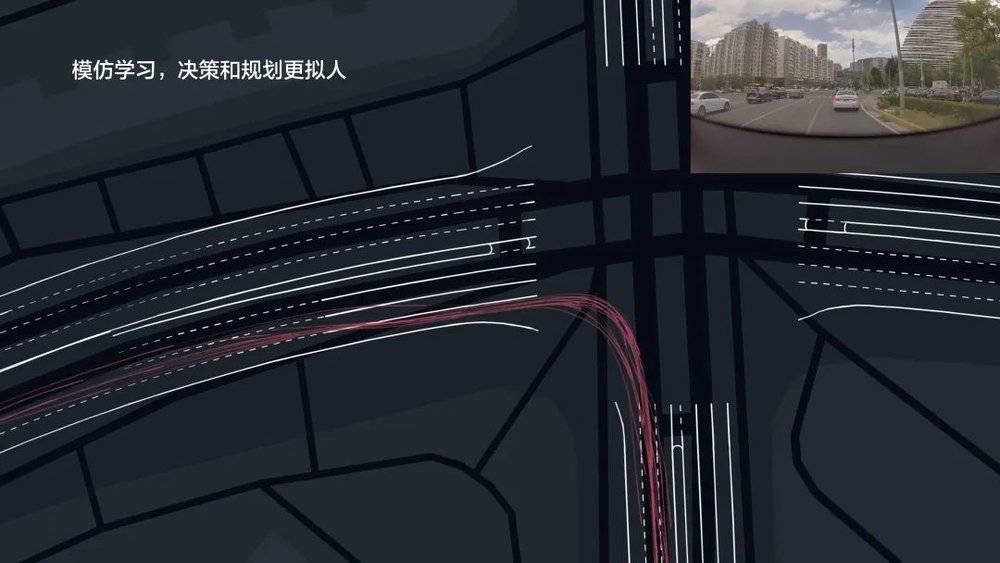
当车辆需要右转的时候,按照交通规则,可以选择右转后两条车道的任意一条来汇入。但理想通过观察大量的人类开车的轨迹,发现90%以上的用户都会走右二车道而非右一车道,因为右一车道的安全性和效率都不如直接走右二好,而且走右二车道的转弯半径更大,转弯过程更加平稳。所以,理想的模型在这个路口学习训练的最终结果,也是倾向于走右二车道。
写在最后
理想的核心技术,并不是大家常说的大冰箱、大彩电、大沙发,而是“场景造物”——先抛出你需要给孩子温牛奶的场景,再卖给你冷暖冰箱;抛出二胎家庭带娃坐车的场景,再卖给你能管得住孩子们的后排大屏;抛出女主人在车里能伸直脚的尊贵感,再卖给你皇后座。
同样的逻辑,再劝你多加四万元或者六万元上Max顶配车型时,理想抛出了一个绝大多数用户都会遇到的场景——通勤场景。
理想给用户所描绘的场景是这样的:“上下班通勤通常也是一天中最疲惫,最需要辅助驾驶的时间。很多车主都非常关心,每天上下班的路上能否使用NOA功能。所以我们推出了大家最需要的通勤NOA产品。”
然而,通勤NOA产品,目前只针对Max版车型的用户。这些多花了几万的顶配车型用户,可以自主设定通勤路线,通勤时即开始自动化训练。简单路线1周以内即可激活,复杂路线预计2-3周完成训练。有了通勤NOA,就好像在上下班路上,让你拥有了自己的“专属电梯”。
那么问题来了,你会多花几万块请一个“AI司机”替你开车吗?