
出品 | 虎嗅汽车组
作者 | 王笑渔
编辑 | 周到
头图 | 视觉中国
论画饼,马斯克争第二,没人敢争第一。
2016年,特斯拉CEO埃隆·马斯克展示了一段“特斯拉自动驾驶”的演示视频——一辆特斯拉Model X,从加州Menlo Park出发,“自动驾驶”到位于Palo Alto的特斯拉总部。在长达3分45秒视频中,这辆特斯拉自动的在城市、郊区和高速公路上行驶,全程没有任何人为干预。
然而,前不久路透社就爆出一个大瓜:“特斯拉宣传自动驾驶的这段视频是演的。”

按照特斯拉自动驾驶软件总监Ashok Elluswamy的说法,该视频是在预定路线上使用3D映射制作的,消费者无法使用该功能。此外,他还提到,“该视频的目的并不是要准确描述 2016年客户可以使用什么。它是为了描述可以构建到系统中的内容。”
简而言之就是,画饼。
特斯拉“视频造假”风波还未平息,国内造车新势力也跟风画起了大饼。
2023年1月28日,春节后开工的第一天,理想汽车和小鹏汽车相继宣布今年“城市级自动驾驶”的规划。其中,小鹏汽车董事长何小鹏宣布,2023年在中国率先推出全自动驾驶,在中国超过50个城市能够放手自动驾驶;而理想汽车创始人李想则宣布,城市NOA导航辅助驾会在2023年底开始落地。
一夜之间,消费者眼前出现了一幅“自动驾驶时代来临”的繁荣景象。
互联网没有记忆,但虎嗅汽车是有的。就在一周前的1月20日,一辆理想L9在开启高速NOA导航辅助驾驶功能状态下,以超过100km/h的时速,径直撞向从右侧变道的车辆。涉事车主发文称,“理想的车机没有任何预警和主动刹停的动作。”具体的事故原因,目前官方仍未正式公布。
显然,未来到来的,还没有那么快。
不光是理想,以特斯拉、蔚来、小鹏为首的造车新势力们,都曾因为辅助驾驶类功能而造成过有人员伤亡的交通事故。但即便如此,各大车企仍乐此不疲地开放更多的功能。前两年,车企宣称要让用户们在高速上“脱手”,今年开始则嚷嚷着在城市里“放手”。
但是,国产车下一个大饼,还真不该拿消费者的命来画。
小心!车企在玩文字游戏
城市级自动驾驶,是2023年车企必卷的方向,没有之一。
核心原因在于,智能化的创新已然乏力。一方面,智能座舱里头的创新趋于同质化。如今随便一台智能汽车,车载屏幕的显示素质基本都能媲美家用电视,车内座椅分分钟代替家里的沙发。在车里追《狂飙》已经是基本操作,在车机上玩大型主机游戏就属于是“高级玩家”了。
但另一方面,车企还要布局未来,让用户在车内有更多的娱乐时间。那么必须把驾驶员从驾驶任务中解脱出来。特斯拉FSD(Full Self-Driving)的目的大抵也是如此——让车自己开,让人去玩车机。
现在市面上所谓的“全自动驾驶”、“全场景智能驾驶”,无一例外都是将“泊车、城区、高速”这三大场景进行拼接,最终组成从A点到B点的自动驾驶。
首先,最为简单的场景就是泊车。由于车速较低、涉及的道路参与者和障碍物较为简单,所以几乎所有的新能源车型都能支持自动泊车功能。
其次,难度进阶的下一层场景是封闭道路。特斯拉最早是在2019年,向中国用户推送了高速NOA(Navigate on Autopilot,自动辅助导航驾驶)功能。

从2020年开启,“蔚小理”相继实现了类似的高速NOA功能。但为了凸显差异化,蔚来和小鹏都进行了重新包装。像蔚来的高速导航辅助驾驶功能就叫NOP(Navigate On Pilot)、小鹏的叫NGP(Navigation Guided Pilot),毫末智行的则叫NOH(Navigation on HIPilot)。

本质上,NOA功能并不是一项全新的、颠覆性的技术,而是把我们常见的ACC自适应巡航、LKA车道保持辅助、ALC自动变道辅助和高精地图定位,这四者进行了一个无缝的集成。所以,与以前辅助驾驶功能相比,NOA功能的差异点就在——定位。
像理想汽车官网对NOA功能的描述是:“基于亚米级高精度定位能力,自主超车、调速与出入匝道”。通常,支持NOA功能的车型都需要搭载一套“组合导航系统”,其核心是高精度定位单元(GNSS+IMU)。其中,GNSS是全球卫星导航系统,IMU是惯性测量单元。
有了组合导航系统,车辆就能够获得三类信息:第一类为坐标信息,如经纬度、 高程,可以区分高架上下、隧道和地库;第二类为姿态信息,包括道路行车过程中的侧倾、俯仰等; 第三类是动力学信息,包括加速度、速度、角速度。在此之上,通过GNSS 、IMU、高精地图三者相互配合、补足,自动驾驶系统才能够获取到高精定位,从而“让车辆知道自己身处何方”。
无论NOA功能的名字如何被包装,N字必须排在首要位置上。N所代表的导航,指的是高精度组合导航定位系统,有了它,NOA功能才能得以实现。即便是特斯拉的纯视觉再牛,它也需要GNSS和IMU来提供厘米级别定位,视觉传感器则提供相对定位,三者共同完成高精定位,最终实现NOA。
NOA功能先被应用于高速场景,主要是因为高速公路的道路参与者相对简单、变化性相对较低。并且,中国城际高速公路和城市快速路加起来也就30万公里,远低于全国的城市道路的近1000万公里。数字。这时候,高精地图的鲜度和覆盖率,就可以达到自动驾驶系统的使用要求。
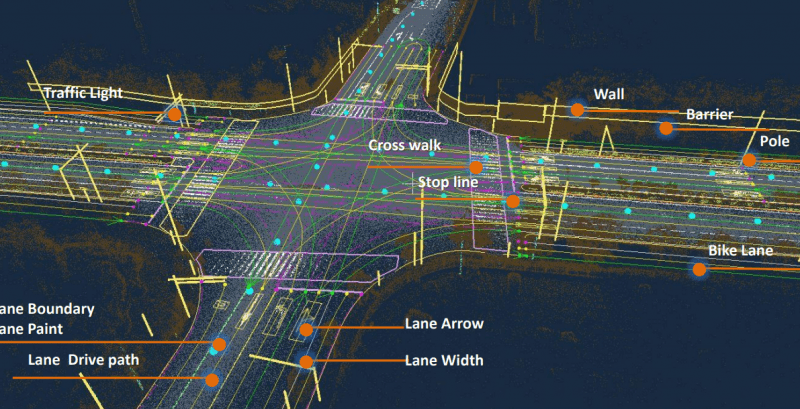
通常来说,高精地图提供的信息包括:道路类型、曲率、车道线位置等道路信息,以及路边基础设施、障碍物、交通标志等环境对象信息,同时包括交通流量、红绿灯状态信息等实时动态信息。这就相当于给了自动驾驶系统一根“拐杖”。
在开启高速NOA功能后,高精地图将为车辆的自动驾驶系统提供道路先验信息。为车辆纵向加减速、横向转向及变道等决策提供先验信息;其次,可预知车道线、道路标识牌等交通要素的位置, 有助于提高传感器的检测精度和速度。
实际上,在特斯拉和“蔚小理”进行大规模量产之后,业内已经开始出现廉价的NOA解决方案。毕竟一套组合导航系统的成本也不高,摄像头+毫米波雷达的感知硬件又可以跟其他功能进行复用,只要添置一套性能和成本兼顾的计算平台,找一家价格实惠的高精地图供应商,基本就能实现物美价廉的高速NOA功能。哪怕是15万以内的低端车型,也都能实现特斯拉需要花3万2选配才有的功能。
注意!出事司机要负责
高速NOA功能在全行业的快速普及,让“蔚小理”有了危机感。尤其是主打智能化的小鹏汽车,曾经有一段时间还把自动驾驶软件包付费当作是其全新的商业模式。但随着意外事故频发、功能推新速度放缓,高速NOA功能对用户的吸引力也开始下降。这时,城市NOA功能的落地,就不得不按下加速键。
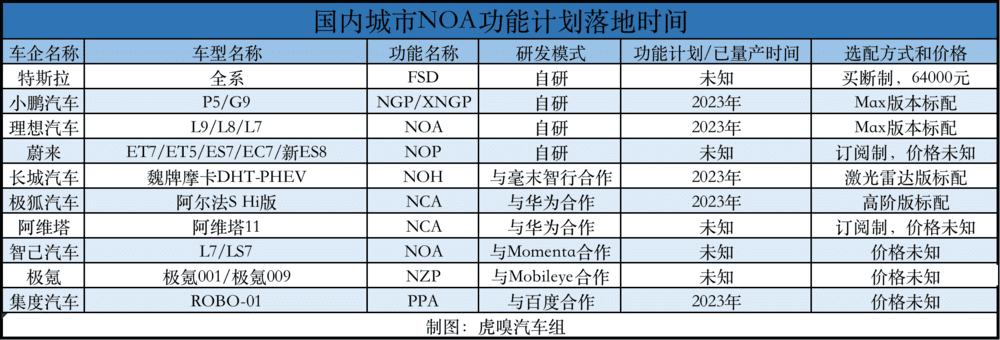
据统计,已宣布计划在今年落地城市NOA功能的车企,至少就有X家。
城市NOA功能,也并非一个全新的事物,只是被车企们重新包装了一下而已。
因为,那些所谓的自动驾驶出租车Robotaix,其测试的功能本质上就是城市NOA。即便它们都挂着昂贵的设备、没日没夜的上路跑测试,但至今也没见得实现远超人类驾驶员的可靠性、通行效率和乘坐舒适性。时至今日,大多数测试车还是被圈在北京亦庄、广州南沙、上海安亭等地的电子围栏里。
很多人高估了NOA的普及速度,低估了城市NOA的开发难度。毫末智行CEO顾维灏告诉虎嗅,“现在城市里面的环境非常复杂,包括静态环境,例如车道线的磨损和重划,路口之间的间距。以及动态环境中,各种各样的机动车、两轮车、行人等。”
根据小鹏汽车的数据显示,其城市NGP的代码量是高速NGP的6倍,感知模型数量是高速的4倍,预测/规划/控制相关代码量是高速的88倍。但更多的车企,是明知山有虎,却偏向虎山行。因为根据小鹏自己的数据,一位车主的平均总用车里程和用车时间中,城市道路占比高达71%和90%。
“城市NOH其实是实现全自动驾驶的一个触发器。”在顾维灏看来,假设MPI(Miles Per Intervention,每两次人工接管之间行驶的平均里程数)只有500米,那么L4就是不切实际。但如果城市NOA的MPI能够达到5公里,这个时候就是抠动扳机,开始更多投入的时候了。因为距离真正的L4越来越近了。
简而言之,啃不下城市NOA这块硬骨头,全自动驾驶就是无稽之谈。

但现阶段,几乎所有的自动驾驶测试车辆,都宛如一个“移动路障”。
比如,上方这段路测视频片段,是集度ROBO-01工程车。集成百度Robotaxi能力的集度,第一次在广州进行路试。但实际上路的效果,却是慢慢悠悠、悠哉悠哉,就连一旁的外卖小哥都能轻松完成超越。再比如,小鹏P5的城市NGP功能,在交汇路口时就表现得像一位刚拿到驾照的新手司机。
“通行效率低的原因,主要是自动驾驶系统用了更保守的驾驶策略。”智能汽车创新研究平台HiEV合伙人洪泽鑫向虎嗅分析道,自动驾驶车辆一般不会超过道路限速行驶,但其实大部分社会车辆都会超。“它是比较守规矩的,所以通行效率低。”
尤其是在高速公路匝道上,依据《中华人民共和国道路安全法》的规定,限定车速为40公里/小时。但如果你在现实中以这个时速行驶,跟在后车必然会“口吐芬芳”。
驾驶策略的问题还算好解决,而系统的安全性才是地狱级的挑战。洪泽鑫向虎嗅表示,“高精地图对安全性有一定的影响。如果你开到某一个区域遇到高精地图出现缺失,那么就会导致系统退出。例如突发的道路施工,会产生与高精地图的偏差,用户需要及时接管。”
在城市里依赖高精地图来使用NOA功能,则更像是驾驶“有轨电车”。严格按照轨道行驶时,它可以做到安全、可靠。一旦轨道断了,乘客的安全性就无法得到保障。最致命的问题就在于此——人类驾驶员压根就不知道,高精地图会在什么时候、什么地点出现缺失。
如前文所说,高精地图在高速NOA功能中起到了神效,为系统提供了“上帝视角”。而理论上讲,如果城市NOA能够拥有高鲜度的高精地图数据,同样可以实现较好的用户体验。但现阶段,由于监管的要求,城市范围内的高精地图测绘制作充满了挑战。尤其是像北京这样的一线城市,即便是通过了层层审核,高精地图的数据并不能完整的覆盖所有行车场景。
像目前,小鹏P5的城市NGP、极狐阿尔法S Hi版的NCA,都需要依靠高精地图的数据支持。所以,其功能覆盖的城市少之又少。像小鹏就仅在广州开通,背靠华为的极狐也仅在上海、深圳等地开始交付城市NOA功能。极狐的官网上,就明确写到一行小字:“NCA智驾导航辅助需在国家法规允许以及高精地图开放的情况下使用,依赖于各城市对高精地图的行政审批通过(某些行政管辖区可能会需要更长的时间),该功能推送时不能覆盖所有城市,将依据各城市审批情况逐步开放。”

从效率和安全的角度来说,城市NOA功能避免过度依赖高精地图才是更优解。并且,车端实时感知和计算的能力的增强,使得规模化部署的理论可行性更高。
“差不多在2016年左右的时候,视觉感知的能力非常有限,看得不远,算力也不行。”顾维灏在加入毫末智行前曾担任百度地图副总经理,主导过高精地图的采集。在他看来,早期高精地图技术是作为辅助手段,来补齐当时自动驾驶技术在感知层面的短板。“现在车端算力大了200多倍,摄像头的个数从一个变成了十几个,像素也高了很多。之前的假设条件已经发生了很大的变化,技术的实现方案也该随之调整。对此,特斯拉做得更加决绝。”
马斯克就公开表示,“过分依赖高精度地图会让自动驾驶系统变得极其脆弱,普及起来更加困难。”实际上,特斯拉从高速NOA功能开始,就摆脱了高精地图的依赖。在进入到FSD完全自动驾驶功能的开发时,特斯拉纯视觉的路径走入了深水区。
再等等!技术成熟还有待时日
从单点功能的实现,到全场景、全范围的覆盖,就像一个“打怪升级”的过程。而反过头来看,每一个阶段都会象征性的里程碑。
首先,硬件参数必须达到拉满。
因为城区场景极其复杂,车道信息、交通标志等关键要素的感知识别,需要消耗大量的算力。像蔚来第二代平台车型,都搭载了4颗英伟达Orin-X芯片,总算力达1016TOPS(处理器运算能力单位)。但这显然是“性能过剩”了,因为支撑FSD完全自动驾驶的特斯拉HW3.0,算力也才达到144TOPS。
相对较保守的小鹏G9、理想L9则用两颗Orin系列芯片,得到508TOPS的算力。毫末智行用的5nm高通骁龙8540+7nm高通骁龙9000方案,算力达到360 TOPS。最“节约”的莫过于极氪了。只有了用2颗Mobileye EyeQ5H,总算力为48TOPS。
理论上,L2级别需要的计算力小于10TOPS,L3约为30-60TOPS,L4需要大于100TOPS的算力,而L5预计需要大于500TOPS 的算力。考虑到算力冗余的需要,城市NOA功能所对应的L3级,最多到200TOPS也就够用了。所以,大部分的智能汽车,还是“算力过剩”了。
算力是够了,但感知层面的短板还有不少。
像上面这个片段,就是比较有代表性的“静止车辆”场景。在视频车辆穿过十字路口时,左前方准备完成掉头的“黑车”突然起步,并阻挡了视频车辆前进的路线。从画面可以看到,小鹏P5的SR环境模拟显示界面中并未检测出这辆突然起步的“黑车”。
市面上,很多车型都开始搭载激光雷达。但绝大多数车型,用的是半固态激光雷达,主要用于中长距离的探测,来识别车辆前行方向上的静态和异形障碍物。然而,它们并不能很好的识别两侧的威胁。
比如,在高速公路上,遇到超宽货车时,系统就不能精准把控邻车辆间距;在城市拥堵的十字路口,车辆无法妥善处理大量VRU(弱势道路使用者,一般指行人、两轮车)的场景,更何况这时还经常会出现人车合流的情况。如果侧向的距离感知能力较弱的话,车辆很可能会对其他道路参与者可能会产生威胁。
对此,当前有车企选择为车辆布置补盲激光雷达。例如禾赛的FT120,就具备超广角视场,通常被放置在车身两侧以及侧后方位置,以便在路口转向、车辆加塞、主动超车、自动泊车等场景下,提升环境感知能力,避免危险的发生。

其次,最能拉开研发差距的,可能就在算法层面了。
2021年夏天,特斯拉自动驾驶技术负责人Andrej Karpathy在AI Day上,公开了 FSD 自动驾驶系统中采用的算法,而Transformer则是其中最核心的模块之一。在国内,毫末智行很早就提出了将Transformer神经网络与海量数据进行有效的融合;在前两天李想也提到,理想汽车的城市NOA将基于BEV感知和Transformer模型来实现。
由于篇幅关系,这里我们不对BEV和Transformer的概念进行赘述。我们只需要知道,Transformer对特斯拉FSD带来的能力提升是非常明显的。
由于是纯视觉方案,特斯拉本就对“眼观八方”有着更高的要求,而Transformer就可以基于全局视野,预训练出一些能够对物体深度信息进行准确感知和预测的算法模型,逐步实现2D图像-3D空间-4D空间的搭建,让世界看起来更真实。而在规划控制方面,Transformer预训练多套算法模型,对博弈策略有较大提升,保证了自动驾驶的安全性与高效性。
在特斯拉纯视觉感知的基础上,毫末的团队还加入了激光雷达的数据。并基于Transformer神经网络模型来进行空间、时间、传感器三个维度的融合,从而去提升感知算法的准确率。尤其是解决了棘手的红绿灯检测和识别,距离摆脱高精地图和车路协同又进了一步。
最后,算法的持续迭代,更离不开数据的闭环。
随着所需处理的数据开始指数级增长,特斯拉也在提高训练神经网络的算力。
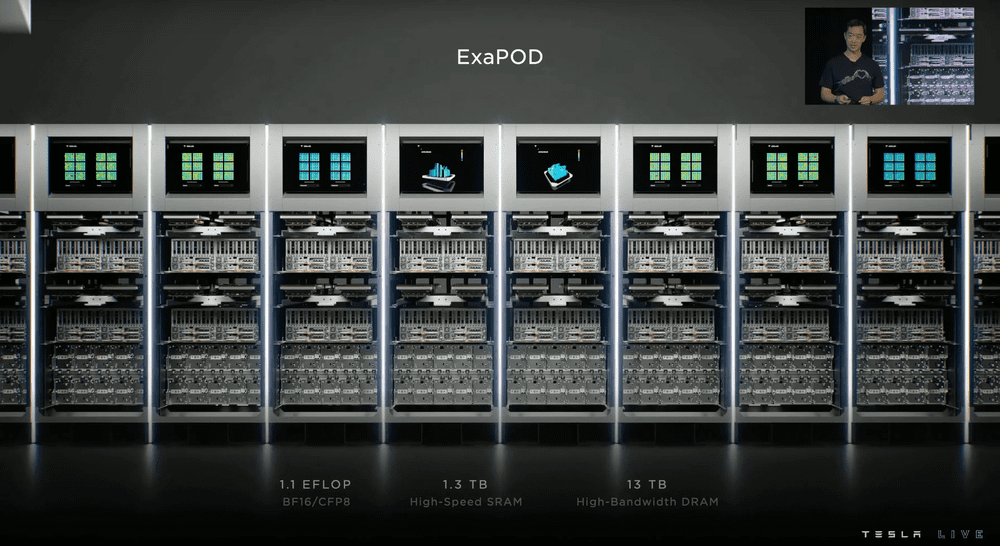
因此,在2021年8月,特斯拉正式发布了自研的云端超算中心Dojo。Dojo来源于日语,意思是 “道场” 。顾名思义,这个道场就是专门用于处理,大量训练特斯拉自动驾驶汽车AI软件数据。来自全球超百万辆特斯拉的数据将汇聚于此。
实际上,无论是开发城市NOA,还是其他智能化功能,越是研发的深入以及用户规模的扩大,自建计算中心的重要性就越发凸显。比如像毫末智行之前的数据标注、大模型的训练、仿真验证等工作,都是在公有云上进行。但随着数量的积累,公有云的效率会存在限制,成本也会变得很贵。
这就要求车企自建私有云和计算中心,以便处理海量的业务需求。
在2023年1月,就已经有两座计算中心上线。1月28日,吉利星睿智算中心正式上线,其支撑了吉利旗下的智能驾驶业务、智能网联、电池云端BMS、新能源汽车安全服务等。再往前推,1月5日,毫末智行与火山引擎联合发布智算中心雪湖 · 绿洲,通过数据管理能力、算力优化、训练效率的提升,来加速城市NOA功能的落地和扩张。
总之,现阶段的算力和感知已经进入平稳发展阶段,要快速实现城市NOA以及最终的全自动驾驶,关键是要看“算法能力 + 数据能力”。
中金曾发布过一份名为《AI 视角下的自动驾驶行业全解析》的研究报告。报告指出,“深度学习是自动驾驶技术发展的分水岭及底层推动力,算法是各厂商接下来应该重点布局的核心能力,同时,数据是决定自动驾驶量产能力的胜负手”。
写在最后
最后需要注意的是,城市NOA功能以及所谓的全自动驾驶功能,仍处于监管灰色地带。
从城市NOA的名称、技术体系到产业链相关环节,技术标准不健全、不完善的情况依然存在。不仅全球范围内都没有城市NOA专门的标准,感知系统的很多核心零部件及软件都缺乏标准。
而那些已经有标准的领域,要满足相关认证工作依旧艰难。例如业内相对成熟的激光雷达,其要进行的车规级认证包括国际汽车工作组IATF16949、国际标准化组织ISO26262及AEC-Q100等汽车行业通用标准。不仅认证难度较大,而且缺乏与现有技术相适应的详细指标。
绝大多数的消费者,对于城市NOA功能还处在一知半解的程度,因此容易出现两个极端,一是不敢用,导致性能过剩、资源浪费;二是过分信任,不遵守双手不能脱离方向盘、双眼不能离开前方的规定,轻则发生车辆剐蹭,重则造成人员伤亡。
因此,车企要在画大饼的同时,保证消费者不能因为被贸然推出的不成熟技术影响人身安全。而消费者则需要为自己的安全负责,决不能因为别人的大饼,自毁前程。