
这哭笑不得的事件,是特斯拉自动驾驶传感器方案,刚刚曝光的新文件。
被“纯视觉”信仰者马斯克扔进垃圾堆的毫米波雷达,要重新捡回来。
重新搭载雷达的车型,最快明年1月中旬就会对外发布。
之所以做出这样的决定,一方面是减配了雷达的特斯拉自动驾驶,表现不尽如人意;另一方面或许也跟毫米波雷达的变化有关。之前马斯克说过,“如果有高分辨率的毫米波雷达,会比单纯纯视觉更好,但问题是这样的雷达并不存在”。而最近随着一批产业链上所谓的4D高清毫米波雷达声势汹涌,或许符合马斯克的要求了。
以及,搞不好特斯拉自己自研了?
从曝光的文件来看,可能性很大。
毫米波雷达重新上车特斯拉
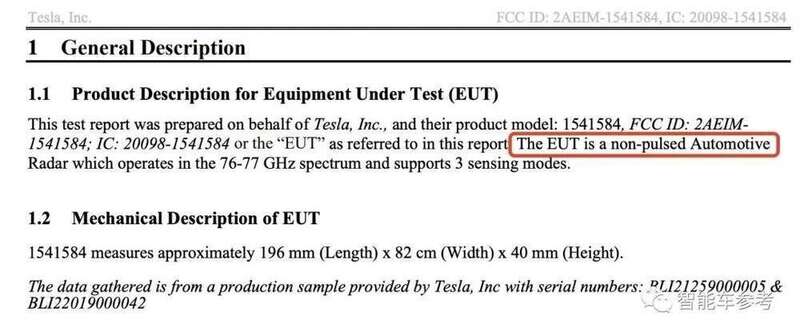
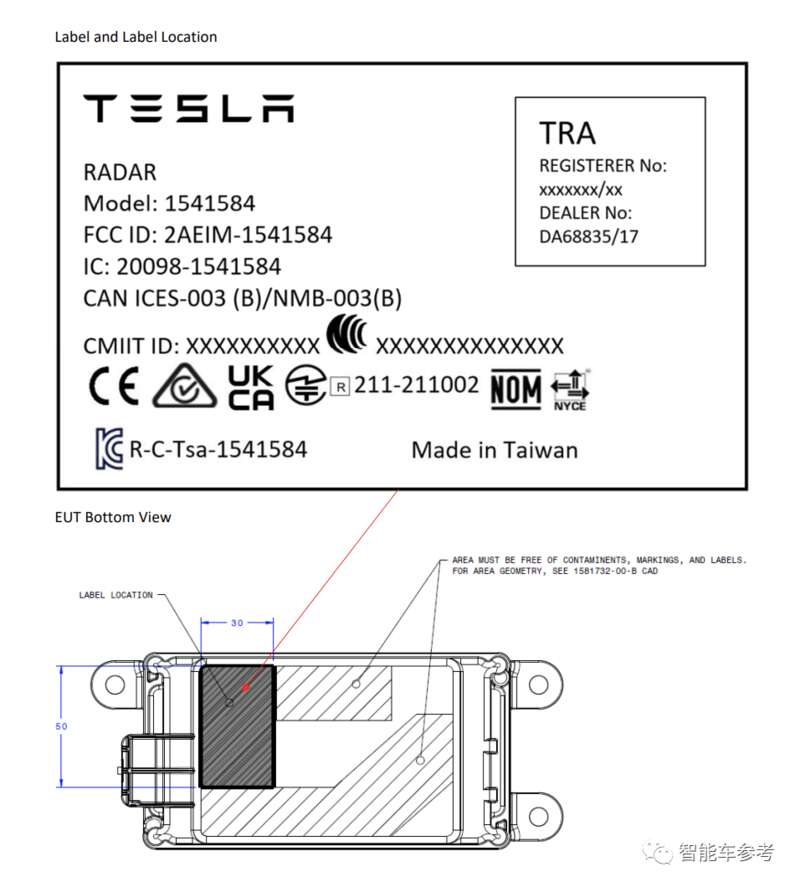
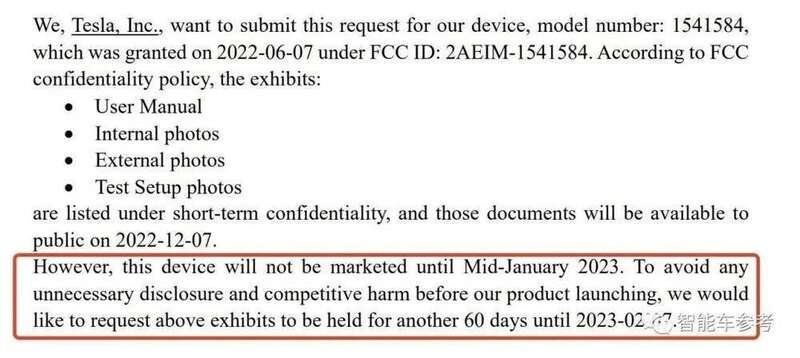
这款毫米波雷达,编号显示为“1541584”。
由特斯拉提交给美国联邦通信委员会(FCC)审核认证,通过后才能投放美国市场。
所以大概率是特斯拉自主研发,而非从其他供应商处采购。
图源:FFC
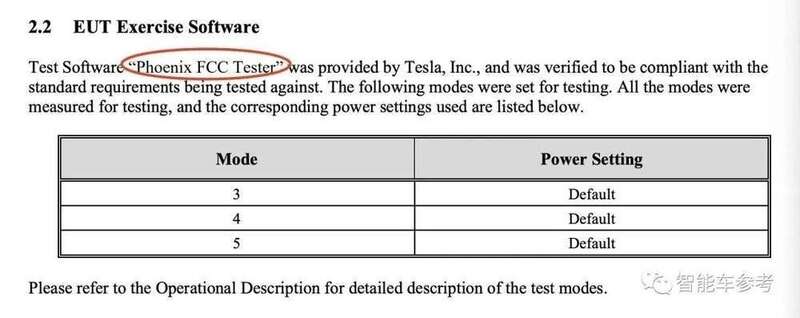
官方将其描述为“非脉冲汽车毫米波雷达”,工作频率为76~77GHz。
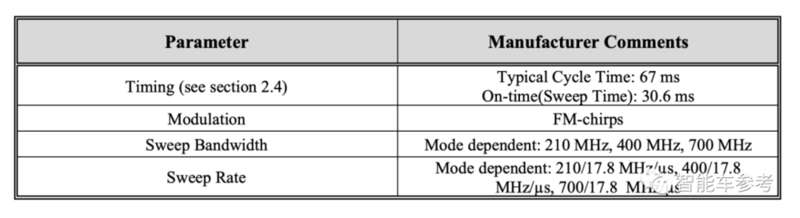
支持三个扫频模式,最大扫频带宽为700MHz,帧周期约为67ms。
图源:FFC
但制造工厂并不在特斯拉总部所在地美国,大概率是代工。
图源:FFC
区别于传统脉冲雷达,特斯拉这款更像是FMCW雷达,即调频连续波雷达。
FMCW雷达的优势在于,所需的发射功率峰值较低、尺寸小、容易调制、成本低、信号处理简单,非常符合车载雷达的性能需求。
包括博世、大陆、德尔福、电装等汽车零部件供应商在内,都已经掌握了FMCW雷达的核心技术,可用于道路车辆监测记录、汽车防撞雷达、车流量检测、自动驾驶等领域。
更进一步来说,有人推测这是一款高分辨率的4D成像雷达。

图源:reddit
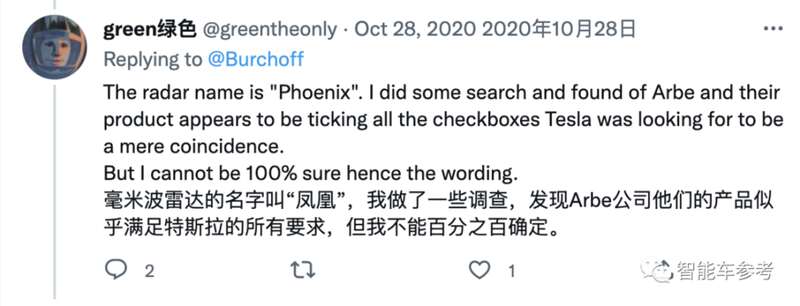
早在2020年,著名黑客Green发推特表示,他在特斯拉软件更新中发现了一个名为“凤凰Phoenix”的毫米波雷达选项。
图源:Twitter
紧接着他发现,以色列一家初创公司Arbe Robotics,刚好有一款雷达产品叫做“Phoenix”。
图源:Arbe Robotics
Arbe官网上对其介绍为:
通过4D高分辨率实时成像,这款毫米波雷达能够识别、评估和应对不同场景,从而服务于现实世界的驾驶需求。无论速度、海拔、邻近距离、大小、周围天气、照明条件如何,“凤凰”都能够把假警报和真正的威胁区分开来,以确保司机、行人和其他道路使用者的安全。
黑客Green当时认为,这款“凤凰”雷达,完美契合特斯拉的要求。
或许是巧合,在这次特斯拉提交的官方文件中,也出现了“Phoenix”这样的词眼,很难不将两者联系起来。
图源:FFC
按理说,截至今年12月7日,特斯拉这款毫米波雷达的更多细节会被公开,诸如用户手册、内部拆解图和零部件构成等。
但特斯拉刚刚临时提交了一份申请,希望FCC能够再保密一段时间,延后到明年2月7日公布。
原因是“这款毫米波雷达要等到明年1月中旬,才会投放市场,为了避免任何不必要的信息泄露,以及防止竞争带来利益损害”。
图源:FFC
具体搭载在哪款车上,目前还不能确定,网友们议论纷纷,除了新款Model 3(代号为Highland),还有人说Semi卡车、Cybertruck、电动船、Robotaxi……
从用途来看,Arbe Robotics公司首席业务官Ram Machness猜测,很有可能用于辅助驾驶系统。
持相同观点的,还有半导体公司Ambarella的雷达技术副总裁——Steven Hong表示,“从工作频率以及雷达的机械设计来看,似乎用于汽车辅助驾驶。”
但也有网友猜测,这款毫米波雷达仅用于车内驾驶员状态检测。
图源:Twitter
总之,毫米波雷达会回来,明年1月就能见分晓。
这也意味着特斯拉的终极自动驾驶传感器方案,又有了新变数。
100%纯视觉的路线,不好走。
特斯拉与毫米波雷达的前世今生
毫米波雷达,众目睽睽之下被马斯克扔进垃圾堆。
去年5月,特斯拉官方公布,北美地区特斯拉Model 3和Y,毫米波雷达被取消。

图源:Tesla
在当时,新款Model S和X,以及北美地区以外生产的所有车型,仍然保留毫米波雷达。
马斯克对纯视觉自动驾驶方案的执着,已是众所周知。
但在之前的方案中,作为冗余,还在车身前端搭载了一个毫米波雷达。
另外就是8摄像头+12超声波雷达。
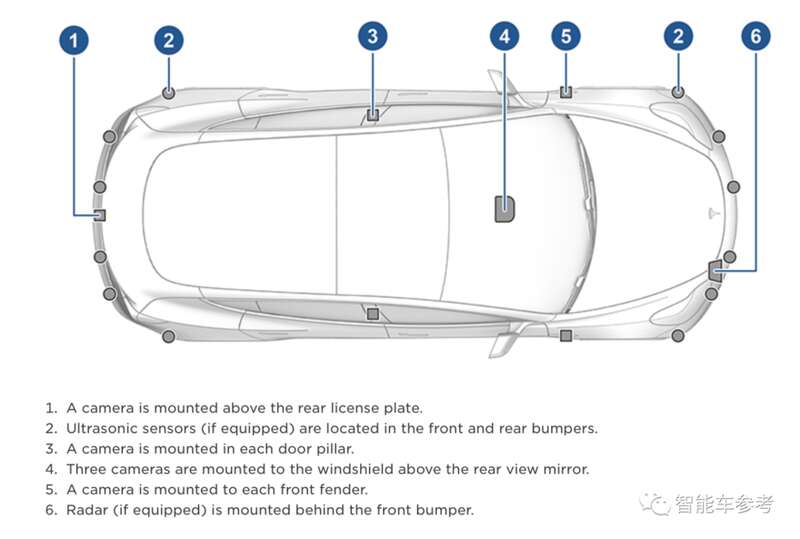
图源:Tesla
相比于激光雷达,毫米波雷达算是车领域相对成熟的传感器了。
毫米波雷达测速,主要基于多普勒效应(Doppler Effect)原理,即便在能见度差的情况下也能检测快速接近的物体,是安全冗余的重要组成之一。
在Robotaxi或高等级自动驾驶中,激光雷达+毫米波雷达+摄像头,缺一不可。
不过雷达也有缺点,会增加车载计算机处理的数据量,对计算能力和多传感器数据融合,提出新挑战。
马斯克之前不止一次对外分享过理念:尽可能使用少的传感器,一方面可以降低成本,另一方面能够减少数据融合和处理的挑战。
当然,马斯克最中意的毫无疑问是摄像头为主的纯视觉。
马斯克的理论是,人类依靠纯视觉开车,为啥AI不行?
取消雷达后,马斯克也并没有解释原因。
但他在推特回复网友提问时,引用了Reddit上一段网友的评论,认为说得很准确。
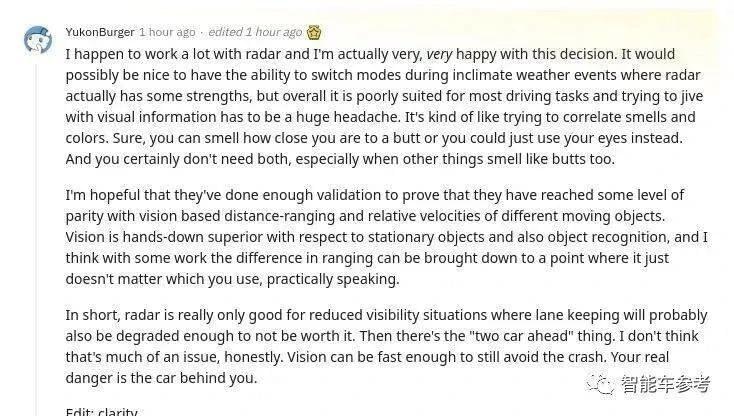
图源:Reddit
这段评论的大意是,雷达感知确实在特殊天气下有优势,不过总体来讲,大多数驾驶场景下没啥用,还会因为增加冗余带来数据处理的麻烦。
该帖里还说,视觉的优势在于静止物体的识别和检测,但技术是可以实现对动态距离和不同运动物体的相对速度的确定的。
整体来说,雷达只是适用于能见度低的情况,可这种情况下,也并非必须得用雷达,特别是前向雷达。
马斯克认为上述这段评论,讲到了点子上。
不过毫米波雷达目前的应用并非只为极端天气冗余,车道居中、停车辅助等L2能力,实际都需要雷达的能力。

图源:Tesla
但特斯拉官方当时给出的解释是,在向纯视觉过渡过程中,这些功能可能会受到影响,但很快特斯拉就会通过OTA软件系统更新解决。
说不定后来在实际问题解决过程中,马斯克又幡然醒悟,意识到必须重拾雷达?
而且马斯克在此之前也明确表示过,他并非完全否定毫米波雷达,他认为“高分辨率的毫米波雷达”胜过纯视觉。
相比3D雷达,4D雷达可以获得更多数据,从而提供给决策规划更多可依赖的信息。
所以如果这一次毫米波雷达真的回归,是否意味着特斯拉也不是100%坚持纯视觉路线?或者无法应对100%的路上问题?
这对马斯克的拥趸和纯视觉路线上的玩家们而言同样是挑战,需要重估了。
特斯拉毫米波雷达文件传送门:https://apps.fcc.gov/oetcf/eas/reports/ViewExhibitReport.cfm?mode=Exhibits&RequestTimeout=500&calledFromFrame=Y&application_id=TAi5l5atHcj4G%2FIFPFuKbA%3D%3D&fcc_id=2AEIM-1541584