
 图 | 殷亚东(来源:殷亚东)
图 | 殷亚东(来源:殷亚东)其曾于 2011 年入选“全球顶尖一百化学家榜单”,同年入选“全球顶尖一百材料科学家榜单”并排名第二。
图 | 殷亚东的谷歌学术首页(来源:谷歌学术)
如今,殷亚东团队的李志伟博士即将回国寻找教职。12 月 1 日,李志伟担任第一作者、殷亚东和明鲁相(Nosang Myung)担任通讯作者的最新论文,刚刚发表在 Science Robotics 上[1]。

图 | 李志伟(来源:李志伟)
论文题为《用于自适应振动和仿生游泳的光驱动软体蒸汽机》(Light-powered soft steam engines for self-adaptive oscillation and biomimetic swimming)。

图 | 相关论文(来源:Science Robotics)
论文中,他们以水黾为灵感,研发出一种浮游机器人,能借助可控的运动来解决现实挑战和问题。
(来源:Science Robotics)
其中,处理污水和清理漂浮物,是已明确的应用方向。该机器人可携带化学催化剂,当它在水面自由浮游时,就能净化污染水体。也可让它装载吸油媒介,去清理水面的原油泄漏。如果以太阳光作为能量源,它可实现持续工作,并且无需额外操控。
(来源:Science Robotics)
设计光驱动软体蒸汽机
研究中,该团队设计了一种光驱动软体蒸汽机(light-powered soft steam engine),在光照下能产生可控的振动,借此可驱动软体机器人的运动。
这种运动可主动响应外界环境比如光线强度的变化,突破了此前很多软体机器人的局限性。
(来源:Science Robotics)
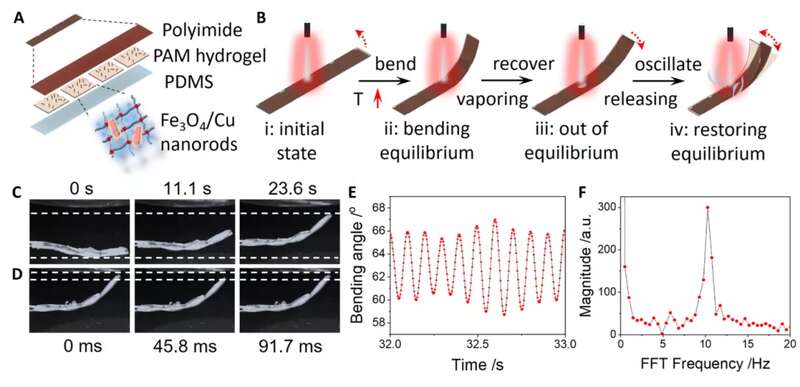
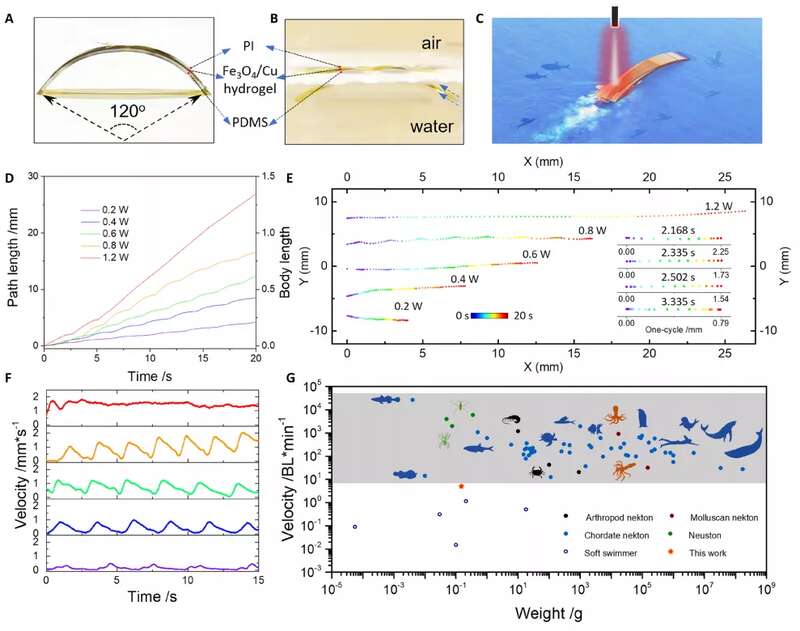
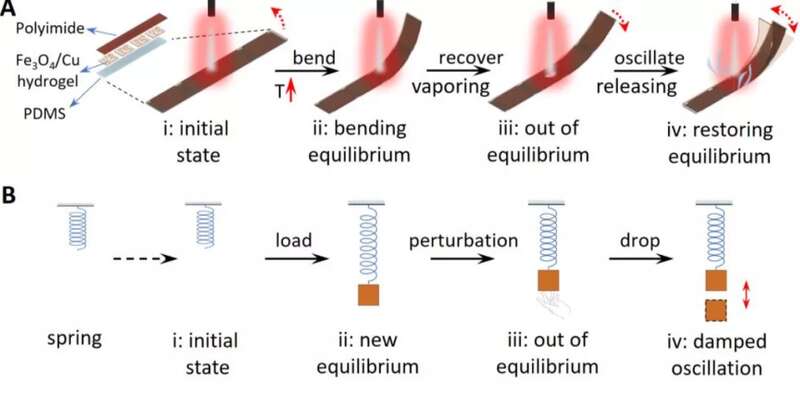
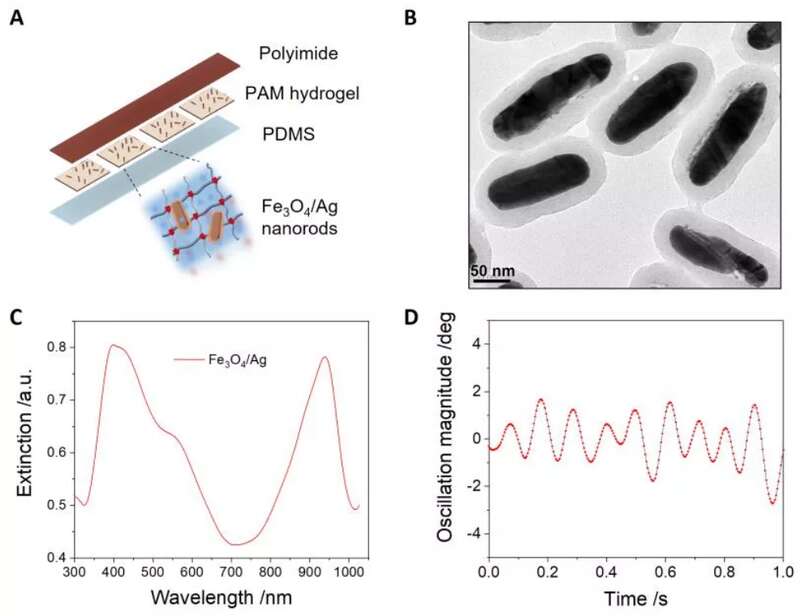
光驱动软体蒸汽机由三层聚合物薄膜组成,自上而下分别为聚酰亚胺、聚丙烯酰胺水凝胶和聚二甲基硅氧烷。
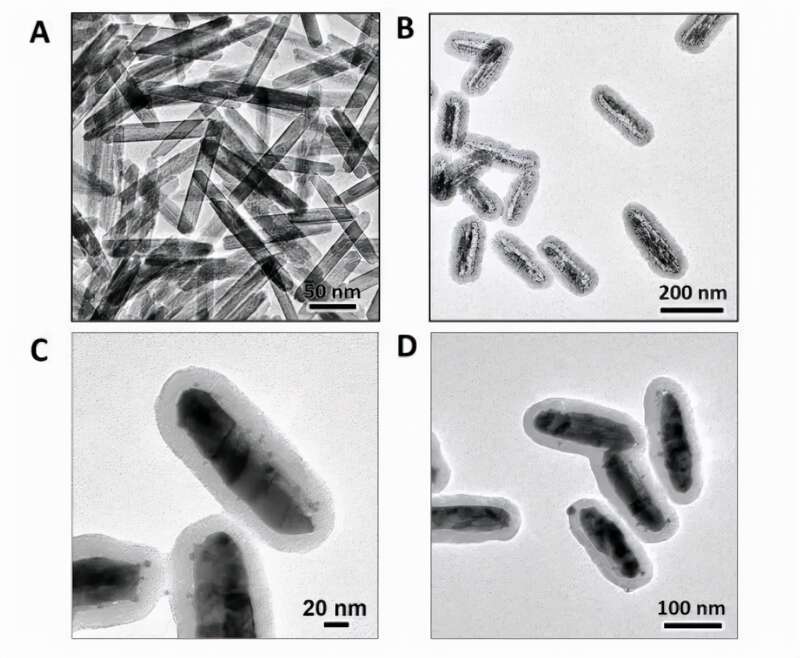
其中,上层的聚酰亚胺的热膨胀系数较小,而最下层的聚二甲基硅氧烷的热膨胀系数较大。中间的水凝胶层可用于储藏大量水分、以及包埋四氧化三铁和铜(Fe3O4/Cu)复合纳米棒,该纳米棒具有光热转换的能力。

(来源:Science Robotics)
当受到光照射时,纳米棒可把光能转成热能,软体机器人的温度由此升高。在相同温度下,底层的聚二甲基硅氧烷的体积膨胀,要比上层的聚酰亚胺大很多,所以软体机器人首先会向上弯曲。
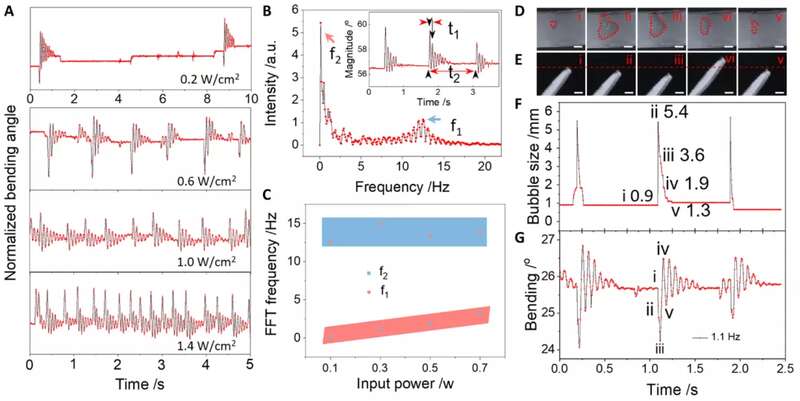
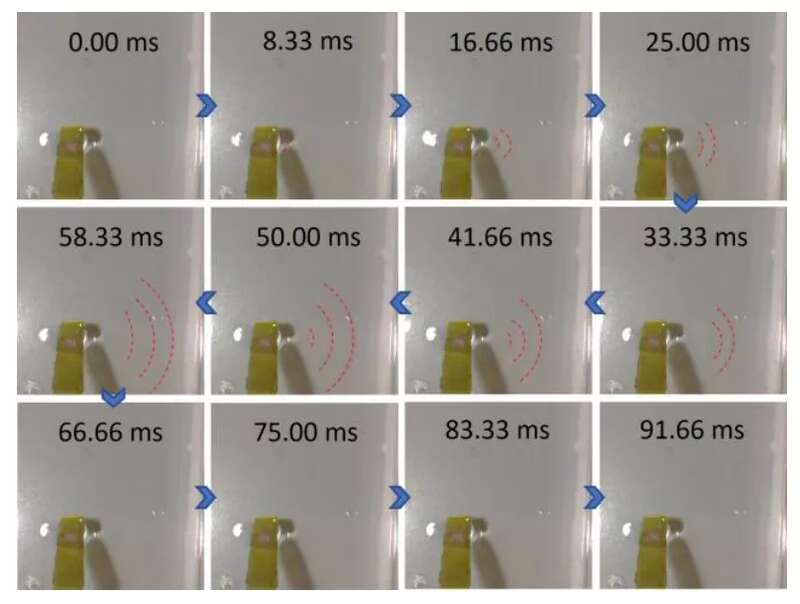
持续的光照会引起水的蒸发,这会在顶层和水凝胶层之间形成蒸汽泡,进而会引发聚合物薄膜的振动。这时薄膜蒸汽机就能以光为能源、水蒸汽为工作流体,以周期性振动来驱动软体机器人在水面上的浮游。
(来源:Science Robotics)
振动产生的频率和振幅,取决于蒸汽泡的产生和释放速率,这时即可通过控制光的强度,来改变机器人的振动模式和运动方式。
比如在弱光照射下,蒸汽泡的产生很慢,这时就能观察到间断的、周期性振动。当增加光功率时,蒸汽泡的产生速率也会增加。基于此机理设计的软体机器人,可以响应外界的光强变化,并能主动改变自身振动和浮游运动模式。故此,该研究为设计可自主适应外界变化的软体机器人提供了新思路。
(来源:Science Robotics)
机器人最快运动速度为 1.3 毫米每秒,约等于每分钟 4 个机器人身长
该研究从立项到成功,大致分为三个阶段。第一阶段是最初的结构设计、材料选择和振动机理研究。初版软体机器人采用经典双层结构,在激光照射下只能实现弯曲,无法自主振动。
为突破这一难题,论文第一作者李志伟博士在原来的结构上引入了水凝胶中间层。水凝胶的多孔结构,可储存大量水分,同时其亲水的特点,使得分散的纳米颗粒可以被包覆。
鉴于此,他们最终选用四氧化三铁和铜的复合纳米棒作为光热转换材料,原因在于铜的等离子基元效应较好,造价也更便宜,而且四氧化三铁的宽带吸收和铜纳米棒在特定波长的吸收,也让制备出的机器人可在白光或特定波长的激光下工作。
(来源:Science Robotics)
在第一阶段,他们还借助高速摄像机,来研究机器人的振动机理,确认在光照射下水会蒸发产生气泡,并观察到气泡的产生和消散,会对弯曲的薄膜产生扰动,进而能驱动可控性机械振动。
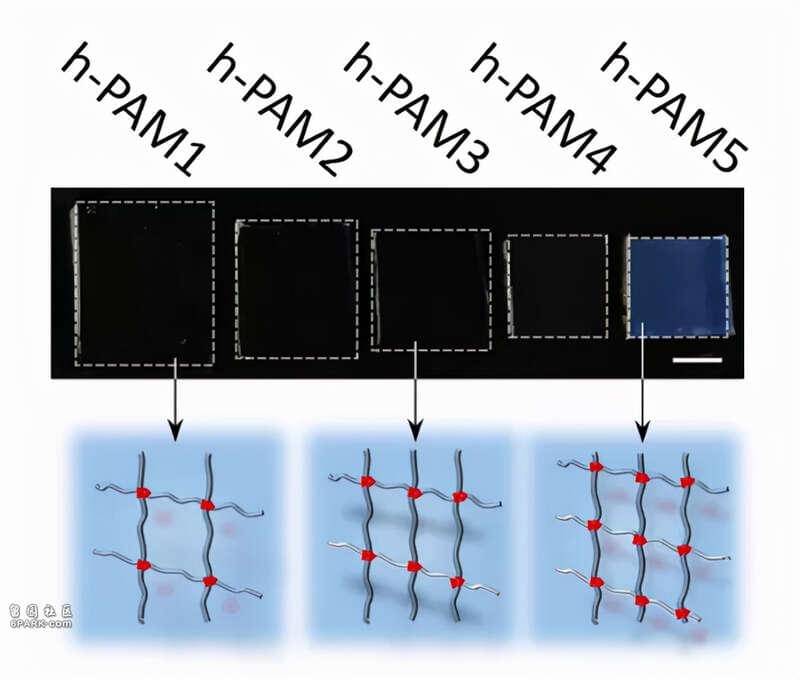
在第二阶段,该团队展开系统性研究,优化了薄膜尺寸,并研究了水凝胶的交联度、以及光强度对机械振动的影响。
他们发现,通过控制这些参数,即可在较大范围内调节薄膜的振动频率和振幅。这时,只需改变光的强度,就能让机器人主动调节振动模式。
第三阶段是设计浮游机器人。受水黾的启发,李志伟设计出水面浮游机器人。在弱光照射下,机器人的运动是间断的脉冲式;在强光照射下,机器人可主动改变运动方式,并以匀速运动为主。
(来源:Science Robotics)
如前文所述,光源可驱动机器人的运动。目前的设计是用激光作为可控的光源。在现有的光功率密度下,机器人的最快运动速度为 1.3 毫米每秒,相当于大约每分钟 4 个机器人身长。后续进一步增加功率,有望可以实现更快的浮游。
在现有的光功率下,相比此前报道的其他浮游软体机器人,该机器人的速度更快,并接近一些自然生物在水中的游速。
另外一个特点是,当使用激光作为光源,激光会产生非常小的光斑,这让照射位置可被精确控制,进而可精确控制机器人的运动方式,实现前进、转弯和后退,并有望在弯曲、狭窄的管道内探索。
(来源:Science Robotics)
以光能量作为驱动方式,可让机器人运动不受导线限制
该机器人的驱动方式,使用光作为能量输入,这让它的运动不受导线限制,因此它具有更灵活、更自由的运动方式,以及更广泛的运动范围。
此外,相比于电驱动的机器人,该机器人还有望实现自然光驱动的可持续和可控性运动,届时不再需要额外能量输入。由于光的波长和偏振态都是非常可调的参数,这让他们可进一步设计机器人结构、以及纳米材料的性能,借此实现更复杂多变的运动方式。
比如在本工作中,他们通过控制照射位置,很方便地实现了机器人的前行,转向和后退。没有借助于其它材料和设备,也没有需要额外的结构设计,他们就可以实现机器人的全向灵活运动。
(来源:Science Robotics)
如何在较大范围内调节机器人的运动?
该团队表示,机器人的刚度通常由如下几个因素调节:
其一是水凝胶的交联度。在制作过程中,可通过控制交联剂用量来控制交联度,而水凝胶的交联度会影响水的蒸发速率和振动频率。
其二是聚二甲基硅氧烷层的厚度。该材料的杨氏模量相对较大(杨氏模量:描述固体材料抵抗形变能力的物理量)。因此,当提高材料厚度,即可制备刚度更高的机器人。
另据悉,他们还研究了聚二甲基硅氧烷层的厚度对机器人弯曲平衡态、振动频率以及幅度的影响。
综合考量上述因素,使得他们能在较大范围内调节机器人的振幅和频率,也为避开机器人的共振频率奠定了基础。此外,鉴于本次机器人的身体比较柔软,因此各个弹性体可通过弹性形变,来吸收振动能量,从而减少振动对自身结构的破坏。
(来源:Science Robotics
巧妙设计弯曲结构,让机器人可持续浮游
据介绍,本次研究开始于 2020 年疫情爆发之前,并在疫情最严重期间完成主要工作。在学校被关闭的情况下,李志伟在获得批准后,利用一切可能的机会进入实验室进行研究,最终高效高质地完成了研究。
在工作接近尾声时,浮游机器人的结构设计遇到了一些困难。由于机器人漂浮在水面上,而且水的比热容比较大,他们担心浮游在水面上的机器人未必能像在空气中一样被光驱动。
(来源:Science Robotics)
经过深思熟虑,李志伟巧妙设计出一种弯曲构造的机器人。该结构可让机器人的两端深入水面以下汲水,还可把水通过水凝胶层传递到机器人身体中作为 “燃料”。
另外,机器人弯曲的身躯可减少热量损失和耗散。看似简单的设计,功能却很实用,也凝聚了研究人员不少心血。
(来源:Science Robotics)
将开发集群式浮游机器人,实现无人机一样的自由运动
该团队表示,后续研究计划主要包括三方面:
第一是开发浮游软体机器人的在现实中的应用。
第二是优化纳米材料光热转换效率,以及控制纳米材料在水凝胶中的功能。目前,他们已开发出一系列具有较高光热转换效率的纳米结构,借此可进一步改善机器人的能源利用率,最终实现太阳能驱动的软体机器人。而且,使用不同的纳米材料,还可制备不同波长和光源驱动的机器人。
另外,他们还计划控制纳米棒在水凝胶层的取向,以便让光热转换也可对光偏振做出响应。通过改变激光的偏振和波长,机器人会更智能、更可控。
第三点是以此为起点,开发集群式浮游机器人,实现像无人机一样的自由运动、集群响应和控制。比如,机器人可以互相沟通、交换信息、协同作业,从而更高效地完成任务。
因此,该团队需在现有机器人结构的基础上,进一步升级机器人的功能,以实现互相通信:其中一种设计方案是把机器人用物理方法连接起来,去实现更复杂的集群运动和合作模式;第二种是加入控制电路,让各个机器人可以相互沟通,类似于集群式无人机一样。