
自动驾驶规模化普及前夕,高精地图低鲜度、高成本的特点一直被产业诟病,并且被认为是自动驾驶向高阶迈进的阻碍因素之一。在2022年,各家车企纷纷宣布“轻地图”方案,给高精地图的发展前景蒙上了一层阴影,引发了行业对其寿命的再次思考,这究竟是翻越山丘还是海市蜃楼?
那么,“轻图化”的发展路径上,图商究竟参与程度如何?未来图商和车企的合作关系会何去何从?未来发展中,地图在自动驾驶中是否是必要的?
基于以上问题,虎嗅智库撰写并发布了《自动驾驶“去图化”问题分析》报告,通过分析“去图化”的背后推动因素,以及车企和图商之间合作的未来走向,揭示地图在未来的发展前景。为自动驾驶领域相关技术人员和决策者提供参考意见。
以下为报告的主要内容。

轻图成共识 无图化难落地
自2022年起,车企开始宣布采用“重感知、轻地图”的智驾方案,抛弃了原本的“重图”模式。这种变化背后的原因主要有两方面。
一方面,采用重图的方式,自动驾驶车辆的感知能力严重依赖地图的精度和数据要素。然而,自动驾驶在高阶段需要不断感知道路信息以作出相应的规划决策,如果过度依赖地图信息,那么道路的实际情况和变化就无法得到准确的反应,从而限制了自动驾驶的能力。
另一方面,BEV+transformer 方案的出现,使得自动驾驶可以对不同传感器数据进行特征提取,并且将感知结果统一转换到鸟瞰视角,变相地降低了对地图数据精度和要素的依赖。虽然,目前的轻图仍然是对感知结果的一种补充,但已经大大降低了自动驾驶对地图的依赖程度。
此外,“轻地图”并非是一种固定的产品,而更像是一种灵活的数据服务方案。它在高精地图基础上,根据车企和自动驾驶公司的特定要求和不同场景,作出了定制化的调整。针对不同场景,提供不同的精度和数据要素,以此来保证地图更新的及时性并降低成本,平衡供应方和需求方的需求。
在精度方面,目前的智驾方案并不强求地图的绝对精度和相对精度,更多地利用车端感知结果的实时建图来实现精度的要求。
在数据要素方面,轻地图将数据要素从过去的上百个减少到了20余个,以满足车企和自动驾驶企业的通用需求。
关于“轻地图”服务方案更为详细的阐述,可点击《自动驾驶“去图化”问 题分析》获取。
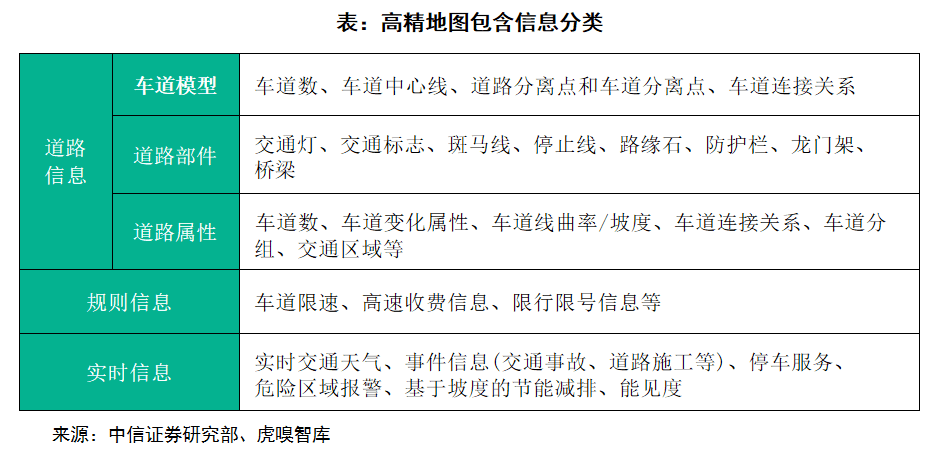
尽管对道路部件信息的需求相对较弱,然而车道模型、道路属性等信息仍然是重要的诉求。无论是高精地图还是轻地图,它们的主要作用都在于在视距内提供感知补充,以及提供视距外的信息,后者在自动驾驶的过程中是必不可少的。
智能汽车的驾驶质量评价标准除了是否能实现长距离的自动驾驶外,还包括安全性、舒适性和效率。安全性意味着车辆能够在无人接管的情况下,确保全场景的安全驾驶。舒适性则需要牵扯到视距外的信息,例如能否避免出现急刹、急转的情况。而提高效率则需要依赖视距外的信息,以减少达到目的地的时间,以及提升整个交通系统的运行效率。
因此,所谓"无图化"其实是一个伪命题。对于摆脱高精地图的依赖,已经在供需两端中达成共识。即使车企可以通过自身的感知能力摆脱对轻地图的依赖,但它并不能取代对视距外信息的需求,而这些信息需要地图提供。根据智驾的实际需求和场景,地图,无论是高精地图、轻地图还是其他类型的地图,都不能被完全替代。
图商和车企的合作模式
在当前环境下,测绘地理信息数据的重要性日益突显,并由此引发一个关键的问题,那就是“去图化”智能汽车智驾方案是否涉及测绘行为。
在政策合规性的推动下,车企与图商的合作越来越紧密,主要体现在两个方面:基于地图使用服务的众源制图合作以及数据闭环。
一方面,基于地图使用的服务通常是动态变化的(主要体现在数据要素层面),以补充自动驾驶能力。另一方面,考虑到对地图精度和数据要素需求的降低,众源车辆成为保证地图鲜度的关键。
虽然众源车辆理论上能够降低成本,并提高地图更新频率,但其数量过多也使得整个工程链条变得更加复杂。并且,每家车企的感知设备和方案却存在很大差异,因此在与多个车企合作时,图商需要解决各种适配问题。在此过程中,成本构成中的一部分会有明显增加,而综合计算下来,也并不能保证总体成本的下降。
数据闭环解决方案以数据采集、传输、处理、标注、模型训练及验证为主要流程,将优化过的模型重新部署于车端,形成一个数据驱动模型迭代的循环体系,现正逐渐成为智能驾驶竞争核心。
图商在此领域的切入,旨在进行合规工作,保证车辆采集到的数据合规性。不过,具备相应资质并且长期服务于车企的图商并不多。
随着新技术的发展和应用,利益链条和利益分配正在被重新洗牌。尽管高精地图的重要性逐步下降,图商却寻找到新的业务方向,并积累了初期优势和资质资源。一旦成功定位了新的角色,他们将有机会在未来很长时间内与主机厂和自动驾驶一级供应商建立深度合作关系。
关于图商车企合作模式的进一步探索,可点击《自动驾驶“去图化”问 题分析》获取。
未来图商的作用不可替代
未来自动驾驶的进步将会从依赖高精地图的重图方案向“重感知、轻地图”的方向演变,这一进步标志着车企和图商的解放,同时推动智能汽车向高级自动驾驶迈进。
尽管随着智能驾驶车辆感知能力的提升,地图对于视线内信息的补充的重要性降低,但它对于视距外信息的补充仍然发挥着重要的作用,直接影响驾驶的舒适性和效率。因此,车对于图的需求存在动态变化的可能性,但无图方案可行性不强。
此外,地图众源、数据闭环业务方向,图商作用不可替代。
大模型的落地应用解决了车端对高精地图的依赖问题,但同时感知能力的提升,车端实时建图,也让民用车辆众源建图成为可能。尽管从数据采集、数据传输、数据清洗、数据加工到数据的应用各环节存在一定的问题,在成本计算上也存在收益性评估困难等问题,但不失为是一种车企、图商双赢的方式。此外,图商手握甲级导航电子地图制作资质和多年地图制作经验,图商手握的导航电子地图制作甲级资质以及对于地图制作的能力积累都使得其具备不可替代的。
同时,在未来的智能交通体系中,图在车与路之间的交流中发挥着重要的媒介作用,未来无法被替代。图是整个交通体系复现的载体,承载着道路交通的各个要素,包括运行的车辆。而车端,可以通过图的信息,明确知道在当下交通情况车辆的最优选择。如此,智能交通的价值才能充分发挥出来,提升整体的交通效率。
结语
通过深入研究我们发现,无论是轻图还是无图,并不足以完全替代传统的地图功能。图商的作用在诸多方面都是不可替代的,包括但不限于基于地图服务的数据服务、地图众源、数据闭环业务等方向。在可预见的未来,地图在自动驾驶中的角色仍然不可或缺。
现登录虎嗅智库官网 ,注册限时体验会员账号,不错过任何最新活动信息。
关于虎嗅智库:
虎嗅智库致力于推动产业数字化以及以“双碳”转型为代表的可持续发展,为参与这个进程的中国企业高管、政府相关决策服务。我们主要的服务手段主要为:研究型内容(报告、分析文章、调研评选)、数据库、线上线下活动与社群、定制型项目等。
我们提供的核心价值:
及时与优质的洞察,了解技术、了解行业、了解同行与对手;
为决策者技术与产品战略决策、产业规划、解决方案选型提供重要参考;
帮助市场全面了解前沿科技及所影响产业的发展状况,还有未来趋势。