
当前,端到端模型在自动驾驶领域崭露头角,成为引领技术的重要力量。那么,端到端自动驾驶模式有何优势?如何训练数据、优化驾驶经验?在复杂的交通环境中,模型又该如何智能且安全地作出实时决策,确保车辆行驶的高效和安全?与此同时,为了赋予用户和监管机构对系统决策的清晰理解,构建对自动驾驶技术的坚实信任,模型的可解释性也成为关键要解决的问题之一。
围绕以上问题,虎嗅智库撰写并发布了《端到端自动驾驶模型方案及发展趋势》。深入剖析端到端的算法演进与产品形态,通过学术界和工业界两个层面的实践案例,揭示端到端模型在自动驾驶领域的探索与创新,为车企及自动驾驶相关从业人员提供专业意见。
同时12月12日晚7点,虎嗅智库将围绕自动驾驶的研发路线开展线上研讨会,特邀北汽研究院、智加科技、环形科技的专家一起在线上畅聊自动驾驶。

以下是《端到端自动驾驶模型方案及发展趋势》报告的主要内容。
端到端模型的算法演进和产品形态
当前汽车行业通用分类,将自动驾驶系统分为传统模块化和端到端两大类。传统方案以感知-预测-规划-控制为核心,如百度阿波罗,适应硬件水平,符合量产需求。端到端方案融合各模块成一个统一架构,通过传感器输入直接完成从原始数据到轨迹或控制信号的映射,符合人类驾驶原理。
虎嗅智库在通用分类基础上,综合考虑对规则算法的依赖程度,按照模型最后呈现的拟人化程度,将自动驾驶模型分为:规则算法驱动的模块化小模型 (a 模型)、半拟人化部分算法规则驱动的模型 (b 模型)、拟人化无规则端到端Al大模型 (c 模 型 ) 。
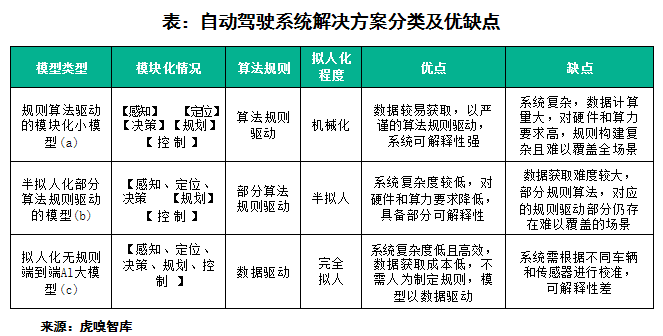
a模型采用传统模块化,但系统复杂,对硬件要求高;b模型在此基础上实现感知-决策一体化,提升信息表达;C模型是完全拟人化的无规则端到端Al大模型,是自动驾驶算法模型的理想状态,以原始传感器数据为输入,并产生规划和/或低级控制动作作为输出, 理论上应具备可解释性,但目前尚无落地成果。
端到端自动驾驶技术在算法演进和产品形态上经历了三个关键阶段。
起初,从基于神经网络的端到端控制模型,到采用监督学习的卷积神经网络端到端模型,再到策略预训练模型,不断加入深度学习和拟人化算法范式,解决更多自动驾驶问题。
学术界的研究始于1988年的ALVINN,随后发展出端到端CNN原型系统。
到2021年,这一技术逐渐体现在产品形态上,通过多传感器配置实现多模态感知,利用高级架构捕捉全局上下文和代表性特征,通过NEAT、NMP和BDD-X等方法提高可解释性和安全性,覆盖了记忆泊车、城市NOA、高速NOA等不同自动驾驶功能,标志着端到端自动驾驶技术进入了探索完整算法解决方案的阶段。
探索实践案例
1、 学术界以上海人工智能实验室为代表,关于UniAD 的探索。
UniAD是上海人工智能实验室、武汉大学和商汤科技合作研发的自动驾驶通用大模型,以路径规划为导向,实现感知决策一体化。
模型将检测、跟踪、建图、轨迹预测、占据栅格预测整合到基于Transformer的端到端网络框架下,通过通用token融合环视图片映射得到BEV特征,实现目标跟踪、在线建图、目标轨迹预测和障碍物预测。
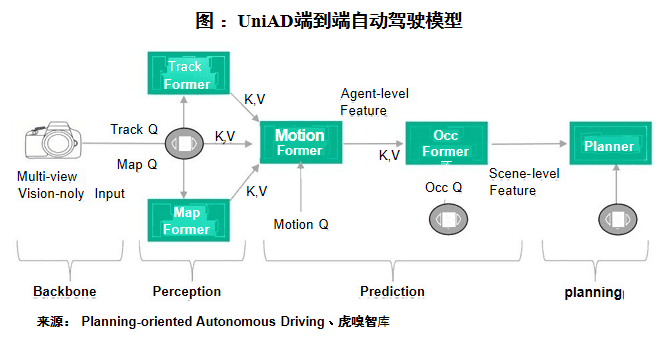
联合优化通过连续时序视频流输入,映射到BEV空间,通过transformer、mapformer、motionformer和Occformer实现特征融合和多步未来占用预测,最终通过Planner进行端到端的多模块联合优化和可微分训练。
UniAD通过先训练感知能力,再训练整体模型,实现了自动驾驶领域的创新突破。
2、工业界以特斯拉为代表,关于FSD Beta v12探索。
特斯拉FSD Beta v12的自动驾驶解决方案采用了感知决策一体化模型。
将“感知”和“决策”两个模块融合到一个模型中,通过纯视觉感知方案,利用影子模式实时收集数据并训练模型,实现仅依靠车载摄像头和神经网络识别道路和交通情况,并作出相应决策。
测试结果表明,FSD Beta V12能够应对绝大多数驾驶场景,但还需要改进在测试中存在的失效场景,如未准确识别红路灯等问题。
关于探索案例更多的详细介绍可点击《端到端自动驾驶模型方案及发展趋势》获取全文。
数据为主、规则驱动为辅将成未来趋势
端到端模型在自动驾驶方案中具有明显优势。它将感知、预测和规划整合到单一模型中,简化了方案结构,提高了计算效率。模型由神经网络构建,以数据和算力为主导,显著提升了模型的训练效率和性能上限。相比传统模型依赖规则驱动,端到端模型更容易实现规模化,实现性能突破。
未来,在产业应用中面临两大挑战。首先,现有感知决策一体化模型缺乏可解释性。无法保障极端情况下模型输出的安全性,并且具有不可解释性,这增加了错误风险和调试难度。
其次,缺少大量真实驾驶数据用于模型训练阻碍了量产落地。传统模块化模型中获取训练数据相对容易,而端到端模型需要大量连续时序的驾驶行为视频进行标注,采集、标注及闭环验证困难,使得量产落地进程放缓。
以大数据驱动为主、规则驱动为辅的模型架构将成为主流,同时借助语言模型范式,通过tokenization实现自动驾驶运行逻辑的可解释性。此外,面向通用大模型的研发也将成为重要方向,以支持泛场景、泛对象、跨模态的自动驾驶应用。通过对深度学习、强化学习、类脑算法等技术的不断探索,推动端到端模型在产业界的广泛应用和持续创新。
关于未来趋势研判更为详尽的阐述可点击《端到端自动驾驶模型方案及发展趋势》获取。
结语:
在自动驾驶领域,端到端模型展现出让AI像人一样的解码能力,通过以数据为主、规则驱动为辅的发展趋势,为行业创新和发展提供了深刻的思考。正如AI驾驶人在不断学习和进化中,端到端模型也在不断地解码着自动驾驶的未来。
现登录虎嗅智库官网 ,注册限时体验会员账号,不错过任何最新活动信息。
关于虎嗅智库:
虎嗅智库致力于推动产业数字化以及以“双碳”转型为代表的可持续发展,为参与这个进程的中国企业高管、政府相关决策服务。我们主要的服务手段主要为:研究型内容(报告、分析文章、调研评选)、数据库、线上线下活动与社群、定制型项目等。
我们提供的核心价值:
及时与优质的洞察,了解技术、了解行业、了解同行与对手;
为决策者技术与产品战略决策、产业规划、解决方案选型提供重要参考;
帮助市场全面了解前沿科技及所影响产业的发展状况,还有未来趋势。