

雷军花33亿元搞的自动驾驶究竟值不值?
就在昨晚,雷军正式公布了小米自动驾驶技术的最新进展,并在现场放出了一段demo视频,展示了小米的自动驾驶技术。
视频中,经过改装的小米自动驾驶测试车可以顺利进行无保护左转、自动掉头、多车道路口左转、环岛绕行、礼让行人甚至自动泊车入位等功能。
仅从视频来看,小米自动驾驶展现出来的效果还比较喜人,甚至都已经具备了城市级别的L2。
但对于大部分自动驾驶公司来说,做一个demo展示的问题并不大,真正的实力还要通过量产车来实现。
不过,小米放出自动驾驶测试视频也传递了一个信息——自动驾驶将会成为小米首款汽车的重要卖点。
从具体投入和人员规模上也能够看出小米的认真。截止目前,截止目前,小米汽车第一期在自动驾驶领域投资了33亿元研发费用,首次展示的视频中一共包含了30个功能,相当于1亿元做出一个功能。
在自动驾驶产业链上下游企业如芯片、传感器等方面的投资总金额也超过了20亿元。
▲小米在自动驾驶方面第一期投资33亿元
而在人才方面,小米汽车全资收购了深动科技,团队规模已经超过了500人,在自动驾驶硬件、感知规控算法、高精地图等领域还有50余位顶级专家。同时,小米内部的人工智能实验室、小爱团队、手机相机部等部门也在协同工作。
这一团队规模已经和蔚来、理想等新造车公司的自动驾驶研发团队持平,而与华为、小鹏的研发团队规模还有一定的差距。
目前小米在自动驾驶方面坚持选择全栈自研,覆盖感知预测、高精定位、决策规划等核心领域,目标是在2024年进入到行业第一阵营。
而2024年也是小米汽车首款车上市的日期,从这点来看,小米自动驾驶或许交付即可用。
那么,小米投资33亿元,500多人团队共同研发的自动驾驶技术究竟如何呢?我们可以从小米官方发布的8分45秒视频内有一个基本的了解,车东西也针对这一视频做了逐帧分析。
一、各种路况都能跑 可实现30项功能
首先我们来整体看一下这8分多钟的视频都展示了什么。
视频中一共包含了三个主要的道路场景,分别为:城市快速路/高速场景、城市道路场景和自动代客泊车,而在这三项主要场景下,又涵盖了30个功能。下面我们来分场景看一下小米自动驾驶的成果如何?
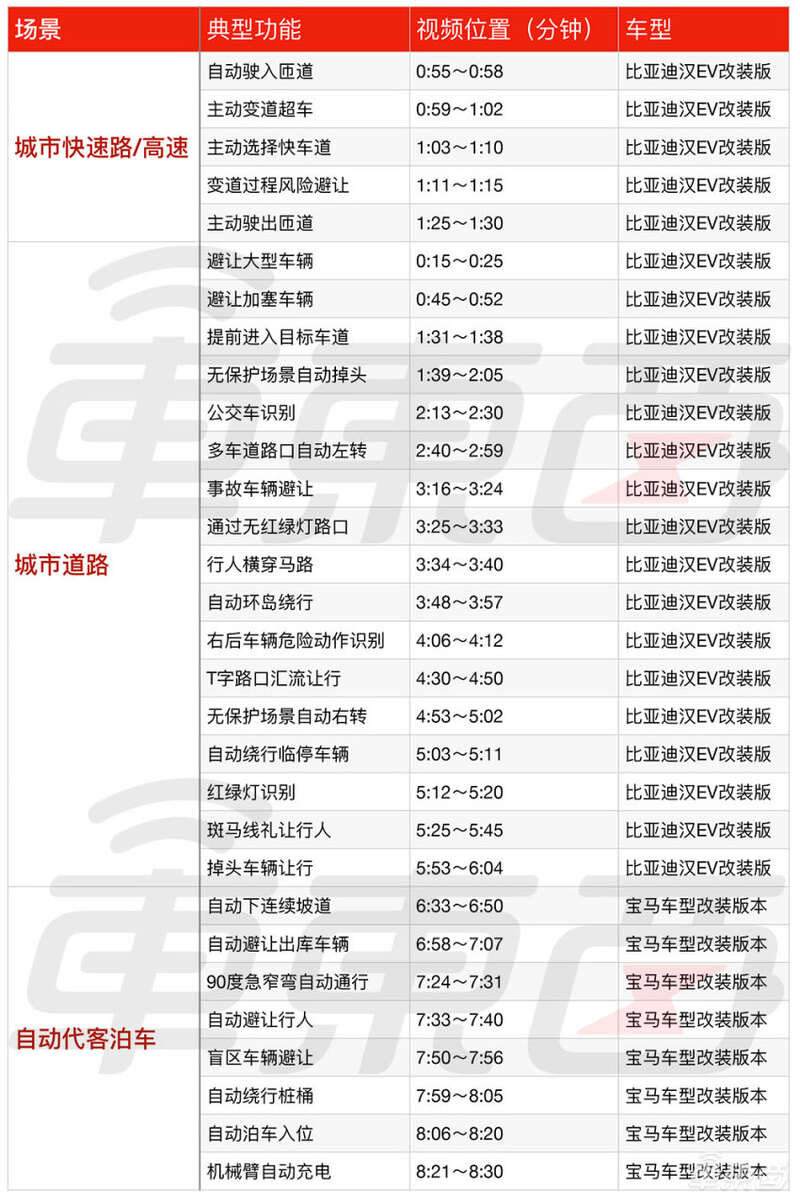
▲小米自动驾驶视频中包含的三大场景和30个功能
1、城市快速路/高速。
视频中,城市快速路/高速和其他的场景都采用了比亚迪汉EV(参数丨图片)的改装车型。

▲小米自动驾驶测试车内饰(上)与比亚迪汉内饰(下)
在城市快速路上,环境比较单一,所以涉及到的功能也并不算多。主要就是主动上下匝道,然后主动变道进入到城市快速路,在城市快速路上可以实现主动变道超车,并根据当前道路情况,主动选择车道行驶。在匝道上也可以实现连续变道,切换到最右侧车道,并顺利驶出匝道。
▲小米自动驾驶测试车可连续切换多条车道
2、城区场景。
在小米发布的这一视频中,最多的就是城区场景的展示。而复杂的城区场景内一共展示了17项具体的功能。
从车机界面可以看到,小米的自动驾驶系统已经基本可以识别道路上的大部分车型了,在和大型车辆并行的时候,小米的测试车会主动偏向车道线的另外方向,实现主动避让。从视频来看,识别到的大型车并没有后斗,也属于异形车辆的一种。
▲小米自动驾驶测试车可主动避让大车
在红绿灯路口,也可以在车机界面上非常清晰地看到信号灯,这说明小米的自动驾驶系统已经包含了信号灯系统,很多量产自动驾驶系统并没有这一功能。在正常行驶过程中,如果前方出现车辆加塞,车辆也可以很好地进行躲避。
在城区道路上,如果要继续直行或者左转,车辆都会提前切换到相应的车道线上。
自动驾驶车辆在城市道路上行驶时,无保护左转或者掉头的难度非常大,小米自动驾驶也遇到了相应的路况,车辆需要主动进行一次左转掉头。
从视频上来看,车辆的处理逻辑为等待对面车道车辆完全驶过,留下足够的安全距离后,才会进行掉头操作。
▲小米自动驾驶测试车进行无保护掉头
而在交通状况更为复杂的十字路口进行左转几乎算是城市道路上最难的场景了,除了要识别旁边的车辆,还要识别穿行的行人、自行车等障碍物,不过从视频上来看,小米自动驾驶车应对得还不错。
▲小米自动驾驶测试车经过无保护左转路口
无保护右转场景下车辆的表现也不错,可以主动避让横行的电动车,而在转向后遇到暂时停靠的车辆也会主动避让。这两件事都发生在很短的时间内,车辆可以做到从容应对非常不容易。
遇到前方车道出现事故车的情况下,小米自动驾驶测试车可以准确识别出来,在车机界面进行标红,然后车辆则会主动绕过事故车辆。这也体现了激光雷达的作用,目前以视觉为主的感知方案中,很难识别到这种完全静止的物体。
▲小米自动驾驶测试车识别出事故车并绕行
即使是没有红绿灯也没有车道线的路口,车辆也能够顺利通过。而遇到穿行的路人,车辆则会减速停车礼让行人。
小米在测试视频中还展示了一个比较特殊的场景——环岛路段,在以往自动驾驶企业的测试视频中,很少会出现环岛路况,小米自动驾驶测试车也可以很顺利地进行环岛绕行,期间还跨越了一次车道,这对于车辆的计算要求非常高。
▲小米自动驾驶测试车经过环岛
3、自动代客泊车。
在视频的最后一段,小米也展示了自动代客泊车技术。
从内饰来看,这辆车和此前在城区进行自动驾驶测试的并不是同一款车,而是根据宝马车型改装的车辆。
视频显示,只要在手机APP上选好车位,并且点击启动,车辆就会自动进入地库,经过连续坡道后,在狭窄的地库内道路上自动前进,同时也可以主动避让前方车辆或者行人,最终找到车位完成自动泊车。

▲小米自动驾驶测试车自动泊车入位
值得一提的是,按照小米汽车的设想,车位附近可以提供一个充电设备,车辆在停好之后,机械臂会自动进行充电。这方面,目前国内已经有多个公司在进行尝试,而大众也在此前提出过同样的想法。从这点来看,小米也一直在探索自动驾驶和补能的联动。
整个测试过程一共有30个功能,如果只从视频来看,小米自动驾驶这一年的成绩确实比较快,已经实现了L2++的自动驾驶能力。
二、部分场景处理不够完美 还有进步空间
说到这里就要说But了,虽然整体效果不错,但也仍然存在一些Bug。整体上可以从具体功能和视频呈现上来看。
1、功能层面。
经过反复观看,车东西发现视频中明显有三处场景还有一定的优化空间,给人的感觉并不够成熟。

▲小米自动驾驶测试视频中明显的Bug
首先是车辆在城市快速路上即将下去时,车辆正在最左侧车道行驶,需要在短时间内连续变道进入最右侧车道。
而在变道的时候,前方有一辆大型车,车速比较慢,同时后方也有车辆,在小米测试车在变道过程中,后方车辆车速比较快,而测试车并没有取消此次变道指令,而是压着车道线持续行驶。
▲小米自动驾驶测试车长时间骑线行驶
直到后方车辆借用最右侧车道完成超车后,车辆才顺利完成了变道。
在日常驾驶过程中,车辆长时间压着车道线行驶存在一定的安全风险,同时也会影响到后方车辆的正常行驶。因此,这一场景下,小米的自动驾驶系统还有提升的空间。
而在后面的城区道路上则又出现了一个相反的场景,当时行驶的道路上,右侧停满了车,和主干道之间还存在一个非机动车道。
在测试车的方面,有一辆车一直在非机动车道上慢速前进寻找停车位,车辆左侧压了一部分车道线。
小米测试车接近后,前方车辆选择了骑着车道线前进,在这种路况下,人类驾驶员会进行减速避让,而视频中的测试车,直接选择了刹停。这样的操作逻辑明显会降低舒适性。
▲小米自动驾驶测试车遇障碍物车辆急刹车
视频中,车辆还进行了一次无保护的左转掉头,在这个过程中,车辆选择等待对向车辆完全经过之后才掉头。
但中间有一段时间,车辆临近的两条车道线上前后都没有车,只有最远的车道线上有一辆车在行驶。这种情况下,人类司机就会直接掉头继续前进了。
▲小米自动驾驶测试车在路口等待时间过长
而测试车则等到对面车道线上完全没有车辆之后,才左转掉头驶入了临近车道线。整个操作过程显得非常机械,不够果断。
抛开具体的功能不谈,整个测试视频也有一些比较明显的问题。
整个demo演示过程中,编排感非常强,有很多场景显然是测试方故意安排的内容。如主干道上突然抛锚的车,地库内凸出的圆锥筒等。
同时,测试也主要是沿着主干道在前进,并没有涉及一些交通情况更为复杂的小道。为了保证安全,车辆和前方车辆之间的车距也比较大,这也导致测试车被频繁加塞。
2、业内人士如何评价。
视频发出后,很多业内人士都对这一视频发表了看法,车东西也和一些自动驾驶工程师进行了沟通。
有一些自动驾驶工程师直接在朋友圈吐槽称:小米花了这么多钱收购,做的demo车,毫无惊喜和亮点。
还有人评论称:“感觉回到了2019年的demo视频。”、“阿波罗5.0开源版本就是这个水平。”
一位新能源汽车厂商的自动驾驶工程师表示,这一视频不是一镜到底的呈现形式,因此车辆具体的表现还不好说,这一视频也是在特定路段和场景做的策略,在demo视频中很常见。
如华为在2021年上海车展期间展示的城市辅助驾驶功能,目前也还没能实现量产。
不过,小米从组建团队到亮出第一个demo视频也不过一年多的时间,目前展示的功能也不是最终版本的内容,所以存在一定的缺陷也非常正常。雷军自己也在演讲中表示对取得的成果超出预期。
三、激光雷达方案为主 交付或具备城市L2
虽然这次展示的只是一个demo视频,跟最终成品可能会存在很大差异,但其中传递出来的一些技术细节可能才是小米自动驾驶中非常关键的内容。
首先在感知方面,大家在看视频的时候一定注意到了车辆顶部硕大的激光雷达套件。小米的测试车采用了禾赛Pandar128线激光雷达,其他的传感器目前还无法确认,但摄像头、毫米波雷达这样的传感器也肯定少不了。
从视频来看,小米并没有走特斯拉这种视觉为主的道路,而是充分发挥了激光雷达的作用。从视频的车机页面也可以看到,车辆在行驶过程中,持续有周边建筑物的点云信息。而三角牌,静止车辆这种让视觉方案头疼的场景也都识别出来了。
也就是说,小米测试车在行驶过程中,激光雷达发挥了比较重要的作用。
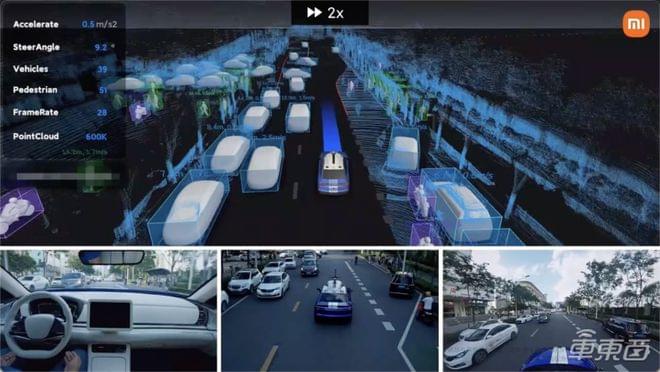
▲小米自动驾驶测试车车机页面
按照目前测试的整体结构来看,在小米汽车的量产车上应该也会具备激光雷达,而位置也应该是车顶位置。
其次,车辆在城市道路上行驶的时候,在大部分场景下是选择跟随前车前进的,但在一些无车道线的路口跟丢前车之后,车辆还会自己主动向前行驶。
从这个方面来看,小米的自动驾驶方案或许对于高精地图的依赖度也比较高,而视频所展示的路段应该都已经实现了高精地图的覆盖。
而在测试视频中,车东西多次发现小米测试车的车机页面上显示了红绿灯信息,不过由于车辆是在武汉智能网联示范区进行的,因此不太好确定这一结果是通过高精地图还是车路协同所实现的。

▲小米自动驾驶测试车可识别红绿灯信息
仅从本次展示的内容来看,车辆实际上已经具备L2++的辅助驾驶能力了,尤其在城市辅助驾驶方面表现非常出色。
目前小米共有40辆不同车型的测试车,在武汉和北京的特定道路上进行测试,根据小米方面的规划,今年底,测试车预计增加到100台,整体目标为140台。

▲小米将规划140台自动驾驶测试车
随着测试数据的增加和软件算法的不断完善,自动驾驶或许会成为小米汽车首款车重要的卖点,可能交付就有城市L2。
结语:小米正在用造手机的思路造车
百度和小米几乎是同时间宣布造车的,但百度选择和吉利合作,一直以来步伐比较快,目前已经展示出概念车了,量产化和渠道建设也正在紧锣密鼓地进行。
而小米这边此前并没有太大的动静,宣布造车后,只进行了一些招聘和投资,并不喜欢向外透露自己的产品进展。
此次雷军演讲也是去年宣布造车以来,公布消息最多的一次,也向外界传递了一个信息——小米也一直在紧锣密鼓地研发汽车。
小米在造车方面选择了自研,意味着很多工作都得从头做起,想要在2024年拿出首款汽车,研发压力确实比较大。
但此次自动驾驶的展示,说明了小米一直没有懈怠,不过从整体思路上来看,小米此次造车的思路和当年造手机比较接近。造手机时先做了一个MIUI系统,然后再把手机造出来,现在则是先做一套好用的自动驾驶系统,然后再把车做出来。
可见,小米已经认准了,在当下的智能设备中,软件才是重中之重,搞好软件之后才会不断打磨硬件能力。