
航天爱好者,英文电子杂志“Go Taikonauts”创办人之一
近日,我国实践21号卫星将失效的北斗G2卫星从地球同步轨道拖至墓地轨道一事引起了国际上广泛的关注。鉴于媒体对此已经有详细报道,这里只大致简述一下。
实践21号是我国于2021年10月24日发射的空间碎片减缓技术试验验证卫星。2022年1月22日,实践21号卫星成功捕获了失效的北斗G2卫星。北斗二号G2卫星于2009年4月14日由长征二号丙火箭在西昌卫星发射中心发射,失效后一直在地球静止轨道上飘移。
实践21号捕获目标后启动自身发动机,将两颗卫星的组合体带离原先位置并向上爬升。1月26日12:00(国际标准时间),实践21号在非洲上空与北斗卫星分离,成功将其送入“墓地轨道”(远离拥挤的地球同步轨道、更高的永久性轨道)。完成任务后,实践21号随即返回到地球静止轨道。

图1:国外分析公司网站显示实践21在墓地轨道释放北斗G2(图源:COMSPOC)
那么这件事为什么会引起如此关注?它的技术难度有多大?它有什么重大意义?对未来我国和世界的航天事业会产生什么影响?我们来分析一下。
太空碎片的危害众所周知,这里就不展开了。国际社会对太空碎片的减缓已达成共识,相关的努力已经进行了很多年。目前,火箭末级的钝化和低轨退役航天器的主动离轨、高轨退役卫星转移到墓地轨道等措施已经在主要航天国家普遍实施。
但面对失控航天器,这些措施就都失去了意义。因此,能捕捉并转移失控航天器的专用太空垃圾“清道夫”就体现出了价值。本世纪来,包括中国在内主要航天国家发射的多个试验航天器都涉及和减少太空碎片相关的技术,比如太空目标的捕捉或非合作对象的对接。而所谓的太空拖船既可以用于在役航天器的轨道转移,也可以拖曳已经成为太空垃圾的失效航天器。不过,它们绝大部分还是停留在概念和技术验证阶段。即便在轨试验也都采用母星释放的模拟目标。直到最近几年,针对真实航天器或太空垃圾的轨道转移行动才成为现实。
第一次从外部对真实航天器实施的轨道转移发生在2020年2月25日。美国诺斯洛普·格鲁曼公司发射的一颗MEV(任务扩展器)卫星在墓地轨道和已经退役的Intelsat 901通信卫星成功对接。这颗卫星被拖回地球同步工作轨道并于4月2日开始重新工作,然后靠MEV的姿控能力来长期维持轨道,以保证卫星继续工作五年。五年后,当MEV携带的推进剂临近耗尽,MEV将会再次把卫星拖至墓地轨道,最后自己降轨再入大气层。2021年4月,第二颗MEV卫星对Intelsat 10-02实施了类似的“复活”操作。

图2:MEV和Intelsat对接实拍(图源:诺斯洛普·格鲁曼)
MEV把历史上第一次“安葬”真实失效卫星的机会留给了实践21号。这自然会引起国际关注。其实从技术上说,实践21号也有“复活”推进剂耗尽的卫星的能力,而MEV同样具备“安葬”退役或失效卫星的能力。客观地说,中美在这个领域平分秋色。
之所以在人类进入太空半个多世纪后,太空碎片清除技术仍处于早期摸索阶段,是因为非合作目标对接(通俗讲,就是捕捉目标)的难度极大。所谓的非合作,指的是太空垃圾或失效航天器不会像飞船和空间站对接那样,装有相互匹配的对接口,对接时双方的姿态也会相互配合。要捕捉通常处于翻滚状态的失控目标,又不和它相撞,需先进的感知能力、创新的捕捉手段和精准可靠的控制。
几十年来,人们已经提出和尝试了很多种非合作对接方式。下面我们就列举二三:
·喷管对接:除了全电推卫星,几乎所有卫星都有一个钟形的发动机喷口。那么,只要设计一个插入锁定装置,就能实现对接。前面说的MEV卫星就采用这样的方式。这已经成为现实。但这种方式不适用于少数卫星和几乎所有太空碎片。

图3:MEV喷管对接示意图(图源:诺斯洛普·格鲁曼)
·机械臂:显然,这是一种非常灵活、通用性很强的方式。只要目标上有可以抓取的突出物,就可以实现捕捉。但这比国际空间站机械臂抓取货运龙飞船来完成对接难度大得多,因为被抓取目标上没有为机械臂量身定做的“握座”。目标的形态可能千变万化。抓取的策略和每一个动作都需要临场确定,对智能程度要求很高。外媒猜测中国2016年发射实践17号卫星可能就具备了这样的能力。这给了中国网民们巨大的想象空间,比如那个一刀把敌方航天器电池板剪掉的动画。
·网兜:这不是幻想,已经成为现实。2018年9月16日,欧洲航天局从国际空间站释放的RemoveDebris卫星就成功进行了一次试验。在距离目标小卫星6、7米的距离上,清道夫卫星突然弹出一团网线。它马上展开成为一个网兜并很快缠住了目标。这个方式对形态各异的太空碎片非常适合。无独有偶,网上流传的此次事件的主角 - 实践21号的发射徽标上也有一个网兜,令人遐想。不过,这个网兜也许只具备“捕捉”的象征性意义,未必能证实什么。

图4:RemoveDebris网兜试验实拍(图源:ESA)
·鱼叉:欧洲航天局的RemoveDebris卫星不仅做了网兜试验,还做了一个“鱼叉”试验,也取得了成功。原理说起来也简单。卫星内部大部分是空的。高速运动的鱼叉很容易穿透卫星或卫星构件的外壳并卡在里面。鱼叉后面有线连到清道夫卫星,从而实现拖曳。但这种方式是破坏性的,不适合正在工作的卫星的轨道转移。

图5:RemoveDebris鱼叉试验示意图(图源:ESA)
·磁性:日本初创航天公司Astroscale发射了ELSA-d卫星。它靠近到目标一定距离后,会伸出一个磁性吸盘,将目标牢牢吸住。这个方案的局限显而易见,就是目标上必须有铁镍物质,不然吸盘毫无作用。Astroscale从今年一月初开始进行一系列试验,包括翻滚目标的捕捉。但截至发稿,还没看到成功的消息。
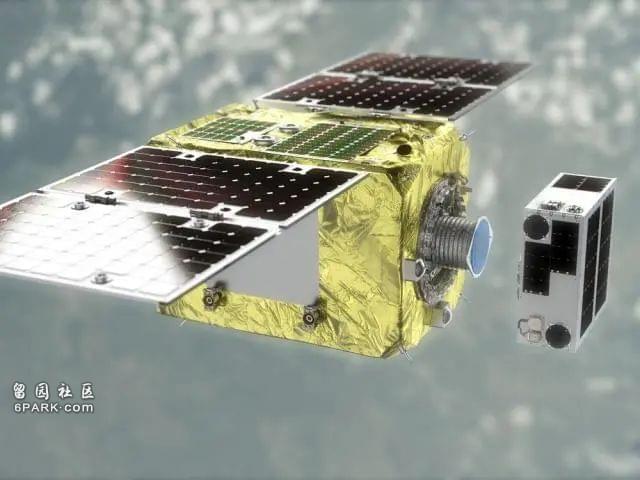
图6:日本ELSA-d卫星(图源:Astroscale)
我们尚不清楚实践21使用什么方式实现了和北斗G2的对接。但它对接的是一颗失效卫星,难度显然比MEV对接的可控卫星更大。不管用的是喷管还是网兜,似乎实践21更胜一筹。

图7:网上流传的实践21卫星发射徽标(图源:互联网)
实践21号和MEV卫星所展示的,不仅仅是解决太空碎片问题的希望,还有航天商业的一片新天地。实践21号和MEV都是名副其实的太空拖船。它们既可以用来对付太空垃圾,也可以用于在役航天器的在轨服务。MEV为前述两颗通信卫星提供的轨道转移和卫星延寿服务都是收费的。未来,在轨推进剂加注、在轨维修、在轨组装和拆卸、未入预定轨道卫星的救援等都可以有太空拖船的用武之地。随着人类越来越多地进入太空,太空拖船的机会和创新空间也会越来越大。
还有一个潜在应用也不必回避。我想很多读者应该也想到了,那就是军事用途。既然可以捕捉非合作的失效航天器和太空碎片,为什么不能捕捉敌方航天器?答案当然是可以。这是反卫星武器的一种方式,但属于比较低效的方式,更适合对付高价值目标。由于外空条约的限制,在太空部署武器会比较敏感。但相信所有航天大国都不会放弃这个领域。以军民两用为目标研发,平时作为太空碎片清道夫和商业太空拖船,战时转为反卫星武器,也许是最好的选择。
短短两年不到的时间内,中美两国率先让“太空拖船”从概念变为现实。更重要的是,太空碎片问题不解决,人类走向星辰大海的通道最终会被封死。人类就只能退回到地球上。MEV和实践21号让我们看到了希望。这个进展也许具有重大历史意义,标志着人类可持续性航天新时代的开端。