
纵观这几年,中国在传统工业机器人领域,还在收购国外企业,追赶西方强国,比如美的收购德国库卡机器人就是一个例子。

但在新兴工业机器人领域,中国可以说是全球领先,和美国平起平坐了,虽然这玩意是美国率先发明出来的,但如今中国已经打破其垄断地位。
有好奇宝宝就会问了:
这是一种什么机器人?
它到底有多厉害呢?
中国又是如何打破其垄断的呢?
章鱼机器人
这种机器人最初是由美国科学家发明的,但起源则要追溯到自然界,技术源自章鱼。
纪录片《我的章鱼老师》让人们对章鱼有了更为深刻的了解,片中章鱼可以用各种策略捕捉猎物,逃避捕食者,展现出超高的智商。
章鱼还有抓取能力超强的触手,触手没有骨骼,由柔软的肌肉组成,可以牢牢抓住猎物,各种大小和形状的海洋生物,龙虾、螃蟹、鱼类,一旦被抓住就难以挣脱。

在遇到危险时,章鱼更是把触手发挥到极致,可以用触手抓住海藻,包裹住身体,隐藏自己,躲避敌人;还可以用触手抓起各种贝壳和石头,披上自制的护甲,甚至能够抵挡住鲨鱼的攻击。

既然章鱼这么厉害,那能不能制造出类似章鱼触手的软体机器人呢?
还别说,美国哈佛大学的科学家们真这么干了,他们运用了仿生学原理,制造出了这样的机器人。

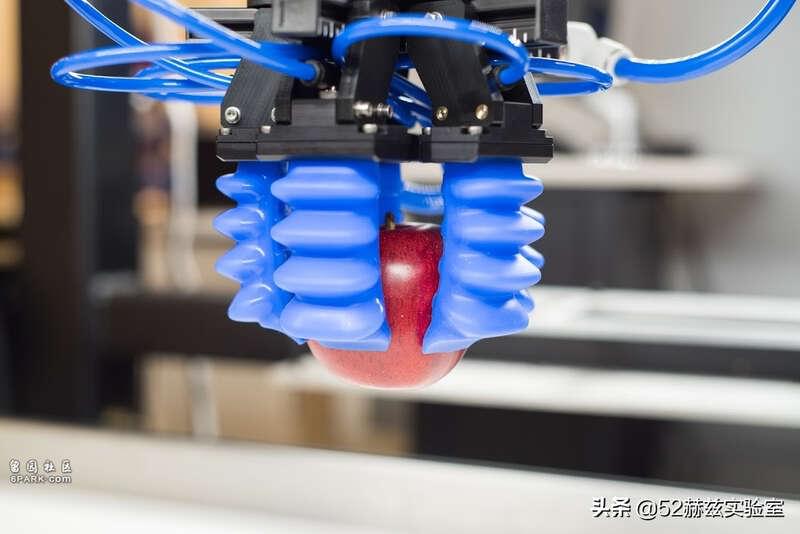
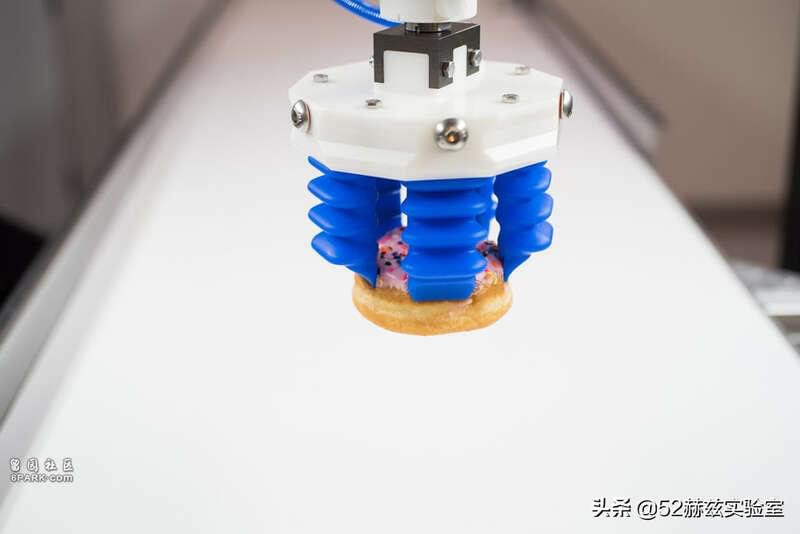
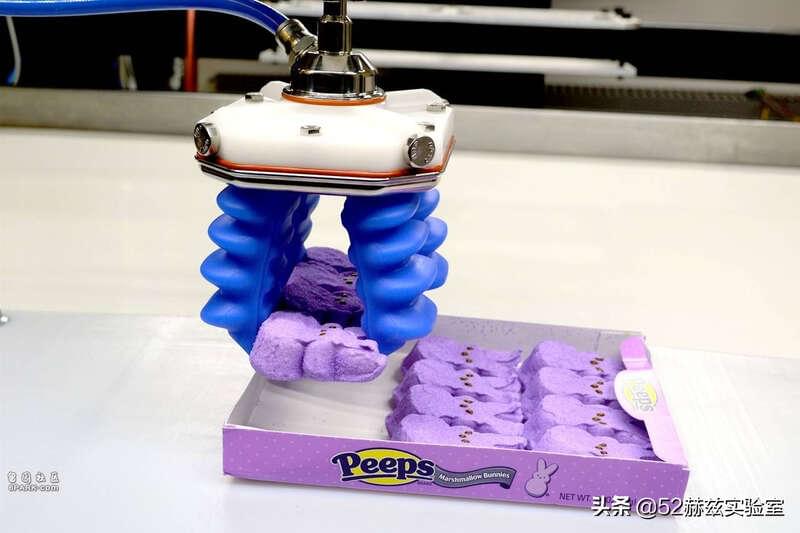
它是由中空的软橡胶“手指”组成,通过气管通气,改变气压,让“手指”动起来,当正压驱动时,“手指”可以抓取物品,当负压驱动时,“手指”就会松开物体。不仅可以模仿章鱼触手包裹被抓对象的动作,还可对物体进行包覆式抓取。
中国企业
值得一提的是,目前能够量产这种软体机器人柔性抓手的企业,只有美国的Soft Robotics公司和中国的两家企业。
注意,这里说的是能够量产,可以实际投入应用的,连德国那家著名的Festo,他们的仿生产品还尚未进入规模化量产和出货阶段呢。
也就是说中国的这两家企业打破了美国的独家垄断!
他们分别是:苏州柔触机器人科技有限公司和北京软体机器人科技有限公司。
先来说说苏州柔触公司吧。
该公司能够生产完整的手爪套件,比如三指手爪套件可以拧灯泡,六指手爪套件可以抓取芒果,还有更厉害的柔喙系列,能准确无误地抓取放置小到耳钉类的精细物品,甚至是柔软易碎的铅笔芯。

并且还可以针对具体被抓的物品,通过改变手指数量、手指形状、手指组合方式等,进行个性化定制,可适应各种抓取需求。

此外,柔触还研发了相应的驱动器,如同手爪的“大脑”,机械臂和手爪有着各自的驱动器,只有两者实现互通联动,才能完美地控制操作。
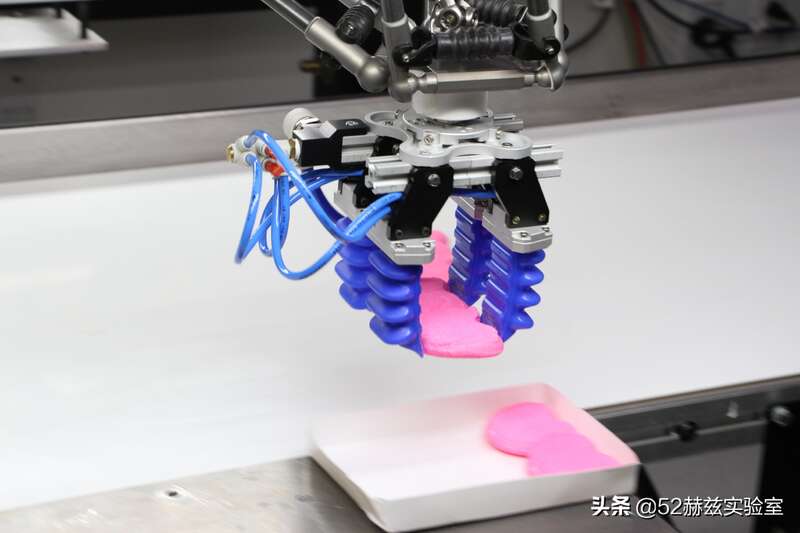
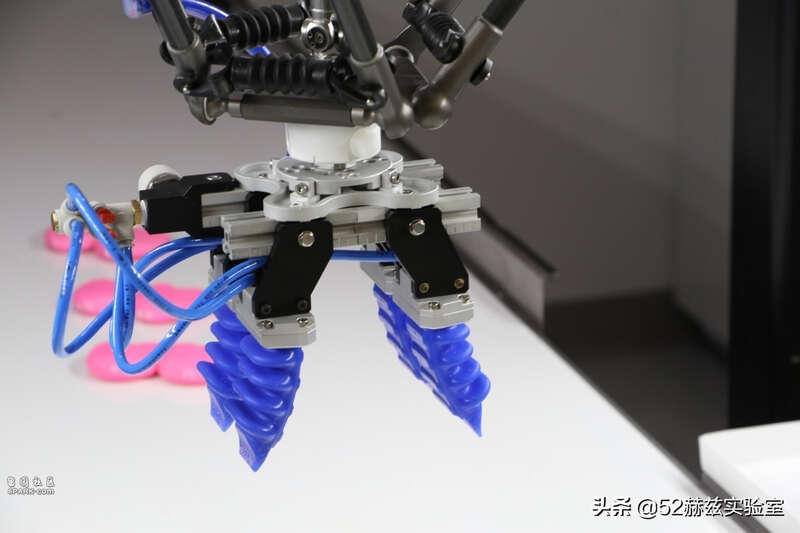
就拿传统的纺织行业来说吧。

由于布料柔软、延展性强,此前布料的分层抓取和堆叠等工作,只能依靠人手来完成,而现在有了柔触机器人,它的柔性夹爪近似于人手,能够化解服装产线机器化难题,可实现布料的分层抓取和精确自动堆叠,可以说是方便极了。
对了,耐克的服装产线中就用了这玩意呢!
至于北京软体公司就更厉害了。
它是国内首家研发量产柔性夹爪的公司,产品精度、寿命和品类均已达到全球领先水平,在多个领域中领先世界,拥有全球领先的软体机器人全流程设计、制造以及相关控制技术,在视觉定位、测量、检测和识别以及多种自动化产线搭建等领域拥有多项核心技术和独立知识产权。

业务遍布全球23个国家,服务20多个行业,近300家头部工业客户,包括比亚迪、宁德时代、肯德基、弗吉亚、法雷奥、博世等。

比如为施耐德打造了全球第一条柔性电气开关包装线,为哈尔斯、安胜搭建全球首条保温杯行业无人智能工厂及数字化平台,实现保温杯行业从手工生产一步实现无人工厂的产业升级。
软体机器人的难点
别看软体机器人就这么一个小抓手,它涉及到弹性体材料技术、软体机器人结构设计、复杂弹性体一体成型技术和柔性体控制技术,技术之间相互耦合影响,复杂度高。
首先就是材料问题。
如果使用普通硅胶会太软、容易断裂,怎么办?
研发人员就对各种高弹性材料的配比以及各种性能测试和调配,历经几千种材料的多次对比和反复实验,使得材料可以达到原始长度三到五倍的拉伸量,产品寿命达到300万次,实现高频率、长寿命的稳定抓取功能。
然后,还需要攻克气体驱动的难题。
软体夹爪是靠高压气体来控制驱动的,但高压气体进入软体夹爪内部空间时,容易出现夹爪两面都鼓起来的情况,这样一来,跟物品的接触面积就减少了,会出现抓不稳的现象。
于是,研发人员成功研制出世界首款双通道结构柔性夹爪,将传统的单通道结构改为双通道设计,夹取物品的那一面就能够保持平整,实现抓得稳。

由于双通道结构很难采用传统模具方式来制造,研发人员经过千百次的反复试验,采用仿照金属精密铸造的消失模工艺,最后才做到产品的一次成型。

除此之外,研发人员还遇到许多困难,虽然没有现成的参考样板和行业技术标准,一切从零开始,但这难不倒我们。
总之还是那句话,外国人能做成的东西,中国人也能搞!
根据国际机器人协会的调查数据显示,全球工业界只解决了3%至4%的规则刚性物品的自动化生产搬运问题,而剩余96%左右的柔性异形、易损物品仍使用人工来上下料。

所以软体机器人可以解决此类的搬运难题。
它们拥有灵活的气动“手指”,可实现对物品的无损抓取,可自适应包覆住目标物体,满足小批量、多品种、订单变化大等柔性生产需求,甚至能从鸡蛋中精准地将蛋黄抓取,使之与蛋清分离,并保证了蛋黄的完整性。
面对不同形状、尺寸、大小的工件,还可以选择不同型号的柔性手指模块和调整“手指”间距,能够适应不同工件的排布要求,无需频繁更换装置,一“爪”兼容多种产品。
而未来将出现各种各样的软体机器人产品,更多的行业将能通过软体机器人来提高自动化水平。
最后
软体机器人是最近10年出现的全新技术,可以说是机械行业里颠覆性和原理级的创新。
虽然中国错过了第一次和第二次工业革命,很多行业的起步都比别人晚,但在软体机器人的商业化方面,目前中国与全球其他国家已经站在同一起跑线上。

如今中国和美国都能量产软体机器人,并且中国企业的产品比美国便宜,寿命还长10倍,品类也更加丰富,所以软体机器人有望成为中国的另一张国家名片。