

出品 | 虎嗅汽车组
作者 | 王笑渔
“机器如果进入人类社会,跟人类共生的时候,机器是一定会造成事故率的,讲难听一点就叫杀人”,在不久前的世界人工智能大会上,华为智能驾驶总裁苏箐,直指特斯拉自动驾驶在“杀人”。
在此番言论持续发酵之时,当地时间7月10日,特斯拉开始在美国地区正式推送“完全自动驾驶”FSD Beta 9.0版本,首批内测规模约为2000人。

用户对FSD Beta 9.0进行实测
在更新之后,一些热心的车主,连夜将特斯拉开到了各种困难场景下帮助特斯拉进行极端测试。比如环岛、路边停满车的窄路、大雾弥漫的夜晚等等。

用户对FSD Beta 9.0进行实测
特斯拉FSD Beta 9与其他厂商的自动驾驶方案,最大的区别在于——特斯拉仅需“摄像头+AI算法”,就能完成“自动驾驶”。
别说激光雷达了,这回就连毫米波雷达都不再需要了。
“先别管特斯拉能不能实现自动驾驶,起码在马斯克的规划里,如果太贵、不能大范围推广、不能全球范围内适用,都是不能接受的发展模式。所以pure vision(纯视觉)才有全适用性。”一位接近特斯拉的人士告诉虎嗅。
一、靠8个摄像头,做自动驾驶?
马斯克在曾提出过一个重要的观点,他相信特斯拉汽车“仅通过改进软件即可实现L5级自动驾驶”。
听起来确实荒谬。
回顾一下,特斯拉曾不断地为汽车做减法:大幅降低车辆线束长度、大幅减少车身零部件数量、大幅压缩生产制造工序。现如今,连毫米波雷达都要被特斯拉所抛弃。
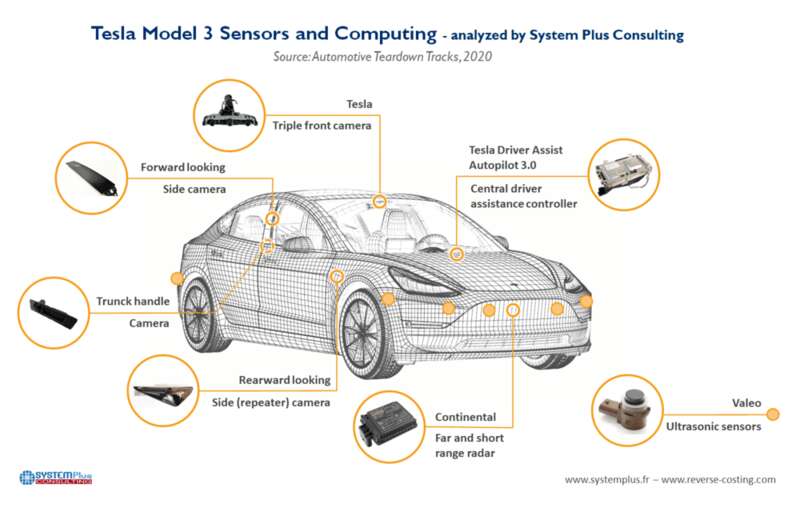
Model 3、Model Y、Model S以及Model X在内的所有特斯拉车型,都在同样的位置安装了8个摄像头,它们分别布置在前翼子板左右两侧、B柱左右两侧、正后方,以及前挡风玻璃上方。
虽然,特斯拉还配备了前置雷达和超声波雷达用以辅助,但是效果有限,而且数量远少于国产车企的产品。这不要紧,马斯克还有一个更疯狂的想法——只用8个摄像头,实现自动驾驶。
众所周知,一个系统想要变得可靠,关键原则是把这个系统做“冗余”。因此,全世界的车企,都在为自动驾驶这个极度需要可靠性的系统,疯狂地做加法。
像百度、华为等国内热捧的自动驾驶大厂,都采用了“激光雷达+高精地图”的技术路线,往L4级自动驾驶迈进。就算是现阶段较成熟的L2级辅助驾驶,也会采用“摄像头+雷达”的硬件配置。
这就有了各式各样的自动驾驶“堆料怪兽”。
目前,市面上即将量产的L4级自动驾驶车型,绝大多数都是售价昂贵的高端车型。比如,搭载激光雷达、具备1000TOPS算力的蔚来ET7,售价为44.8万元-52.6万元。同样,搭载3颗激光雷达的极狐阿尔法S华为HI版,售价38.89万-42.99万。

上个月,百度Apollo和极狐合作,推出新一代自动驾驶车型Apollo Moon搭载了禾赛科技定制的激光雷达,官方给出这台车的成本价,48万元——用这个钱,可以在北京聘请一位熟练的老司机,连续开车长达四年之久。
成本问题一直是业内对激光雷达的争议点所在。比如,蔚来创始人李斌就认为,在安全性上的成本提高是值得的,而且这个成本总体可控。“激光雷达像很是汽车的安全气囊,从车的安全的角度来讲,安全带发挥的作用虽然大于安全气囊,但是车上不能没有安全气囊,能增加车的可靠性的。”他说道。
成本还是安全,这个原本答案显而易见的问题,到了自动驾驶技术上却出现了分歧。
虽然特斯拉FSD Beta 9,凭借着超强的算法能力,仅用摄像头感知,就让车辆在城市道路进行自主的驾驶,但不过出现BUG的时候还是需要人类驾驶员去接管。
FSD Beta 9.0开进公交车道
比如网上的测试视频中,就出现了闯公交车专用道、在单行车道上逆行、压实线并线等情况,严重的还有径直冲向道路中央的绿植。
在今年6月中旬,美国汽车安全监管机构曾公布一项数据,自2016年以来涉嫌使用高级驾驶辅助系统的特斯拉汽车的事故达到30起,其中涉及10人死亡。在那些开启辅助驾驶的事故背后,人类和机器处于共同驾驶的状态,责任的认定就会变得愈发棘手。
FSD Beta 9.0实线变道
上海交通大学凯原法学院郑戈教授则认为,“在目前行业标准尚不成熟的情况下,可以由整车制造商或自动驾驶系统开发方案上统一承担责任,如果其他软硬件供应商存在过错,可以基于过错追求其侵权责任或违约责任,能够更有效地保护事故受害人的权益。”比如威马汽车CEO沈晖就表示,威马的无人驾驶如果发生事故,责任方应归主机厂。
目前,特斯拉能做的就是警告用户——在特斯在FSD Beta 9测试版说明中也会警告司机,不要过度相信辅助驾驶系统。而马斯克则声称:“运行预制软件既是工作也充满了乐趣。但测试列表依然停滞不前,因为我们有很多已知的问题需要修复。Beta 9解决了大多数已知的问题,不过也会有未知的问题,所以请保持警惕。在特斯拉,安全永远是第一要务。”
但不过,让人类驾驶员随时准备接管机器,本身就是一件很难的事情。
正如华为智能驾驶总裁苏箐所说:“普通用户对新科技产品有一种倾向——一开始完全不信任,但一旦他试过,他觉得很好的,就会变得非常非常信任,这个时候就是出事故的开始。”
二、有“外挂”,为何不用?
“广义的自动驾驶是一个难题,因为它需要解决非常多的现实世界的人工智能问题。此前没想到这么难,但回想起来难度是显而易见的。”这是在V9推送之前,马斯克在社交媒体上写的一句话。
在“卖惨”背后,马斯克还有句话被忽略——“没有什么比现实,拥有更多的自由度”。这里的“现实”指的是特斯拉的摄像头里看到的“现实世界”,也就是特斯拉所坚持的纯视觉感知。

目前业内比较主流的传感器,包括摄像头、激光雷达、毫米波雷达、超声波雷达。
考虑到各种传感器均有自己的局限性,车企或自动驾驶集成方在应用场景和系统功能设计的过程中,需要充分考虑功能安全冗余,通过足够可靠的传感器方案,配合可靠的算法、以及计算和执行单元,来保障整体系统的功能安全。
就比如,纯视觉感知所采用的摄像头,成本低,可以识别不同的物体,在物体高度与宽度测量精度、车道线识别、行人识别准确度等方面有优势,是实现车道偏离预警、交通标志识别等功能不可缺少的传感器。
但是,摄像头有两个致命缺点:一是作用距离和测距精度不如毫米波雷达。二是容易受光照、天气等因素的影响。
而毫米波雷达恰好可以弥补,但毫米波雷达不能成像,所以难以识别车道线、交通标志等元素。所以两者,需要相互配合。
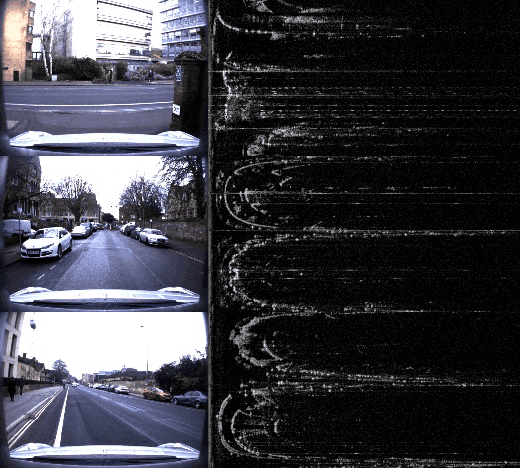
毫米波雷达的数据集(来源:Oxford Radar RobotCar Dataset)
绝大多数企业会采用摄像头+毫米波雷达的融合方案,来实现L2级自动驾驶能力,更准确的说是ADAS辅助驾驶,比如自适应巡航、车道保持等功能。
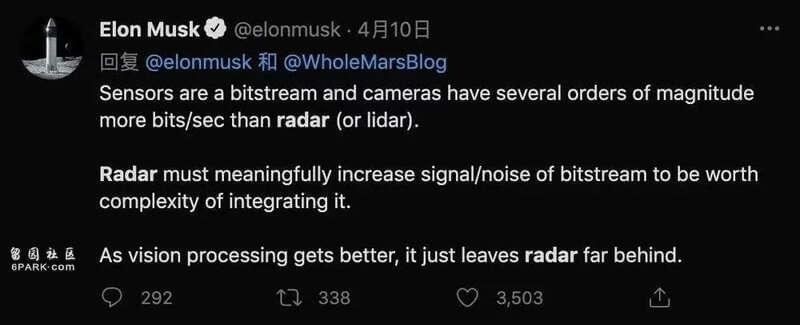
虽然,这两种零部件成本都比较低,但马斯克依旧拒绝雷达这个选项。因为他的担忧,在摄像头和雷达的感知融合上。
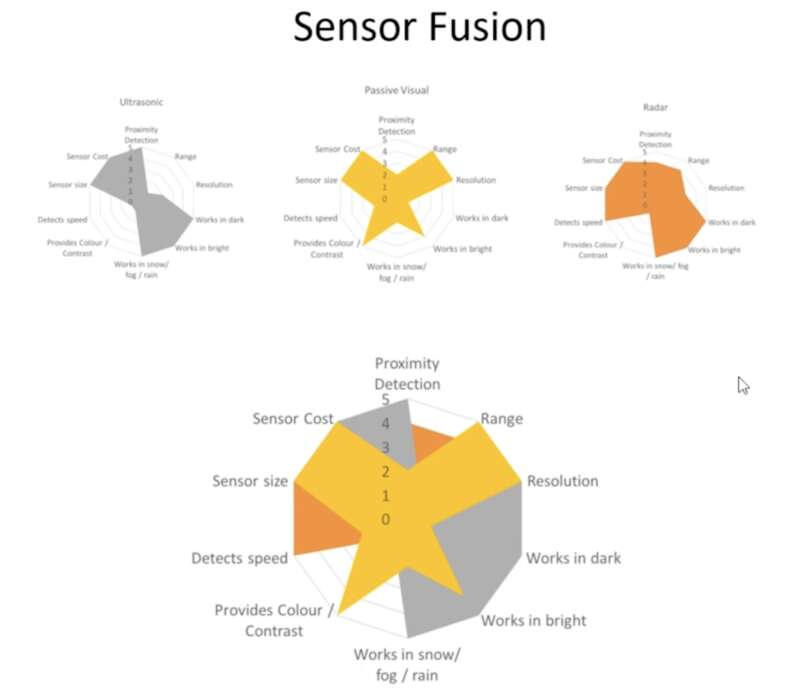
理论上,传感器融合相当于把各传感器优势叠加
融合摄像头数据和毫米波雷达数据最大的障碍在于,毫米波雷达信噪比很低,换句话说有大量误检测,将视觉感知结果与毫米波雷达结果进行融合时候,如果视觉和毫米波感知结果不一致,惯常做法是相信视觉,忽略毫米波检测结果。
比如,特斯拉就出现过“幽灵刹车”,车辆驶入隧道或阴影处,系统会将阴影识别为障碍物而突然刹车,甚至导致追尾。该问题同样出现在新款理想ONE上,相比老款,它的前置摄像头和毫米波雷达,以及算法都有明确的改动。
马斯克此前就通过社交媒体表示,纯视觉方案会彻底消除幽灵刹车的问题。那么解决方式,大概率就是无视毫米波雷达的信号。

还有特斯拉著名的“撞白色货车”的事故。
罪归祸首,也是毫米波雷达。因为毫米波雷达无法测出货车上方桥梁和道路指示牌的高度,在毫米波雷达的“眼里”,静止的货车、桥梁、指示牌都是地面上的物体。这种情况需要屏蔽毫米波雷达的信号,但显然事故发生时是没有。
所以,马斯克的做法是,“干掉”惹事的毫米波雷达,一心突破摄像头的短板。
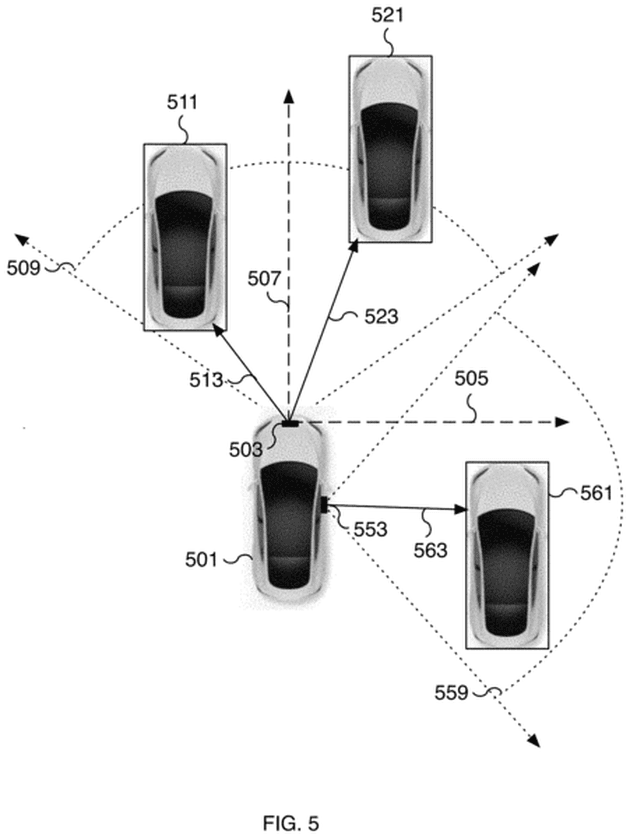
今年3月,特斯拉获得了一项“使用视觉图像数据估计物体属性”的专利。该项专利使用两个神经网络,仅使用图像数据,测量与物体之间的距离。其中一个神经网络可确定物体与车载摄像头捕捉到的图像之间的距离。另一个神经网络以标注图像的形式,为前者创建训练材料。
在测距问题上,特斯拉是解决了。但至于极端天气情况下,仅靠摄像头的纯视觉感知能否保证安全,目前特斯拉的测试用户中还没有出现“中奖幸运儿”。
“用户就是免费的安全员”,某自动驾驶公司人士向虎嗅这样总结道。
三、为何国内车企不用学特斯拉?
那么,既然传感器硬件的问题可以解决,为何国内车企不学特斯拉呢?
首先,数据量就不在一个级别。
特斯拉的“影子模式”,会始终观察外部环境与驾驶员的动作。若在某个特定场景中驾驶员的操作与“影子”的预判不符,则此次数据会传输到特斯拉的服务器中,对算法进行修正性训练,在下次同场景时予以更正。
这背后,依靠的上百万辆、由用户驾驶的真实场景数据。而不是一些自动驾驶测试车在荒郊野外,一圈一圈跑出来的。本质上,人工智能就是“喂”数据,自动驾驶也逃不过这个环节。

某品牌自动驾驶测试车
其次,商业模式也不同。
即便是标榜着互联网基因的蔚来汽车、小鹏汽车,其营收构成中仍有超90%的收入来自汽车销售。国内车企推出的所谓的智能汽车,还在跑规模的阶段,新产品的迭代自然也要伴随着新的硬件加入。功能实现与否先不说,起码把硬件的天花板提到最高。
特斯拉希望尽早的打破这个“卖车不赚钱”的格局,从自动驾驶软件付费上赚更多的钱。
但前提就是,存量车型和新增车型需要保持自动驾驶硬件的一致性,这样才能通过一个软件OTA,实现功能的统一升级。而这也就是为什么,特斯拉无论是售价百万的Model S,还是二十几万的Model 3都采用同一套8个摄像头的配置组合。
特斯拉首席财务官扎克·科克霍恩,在2021年Q1的财报电话会上说过:“基于完全自动驾驶(FSD)的经常性收入将潜力巨大,我们有一系列不同车型,有大量的用户。”
特斯拉在全球的存量用户早已超过100万辆。2020年,特斯拉在全球交付49万辆新车,今年上半年,光是在中国就售出16万辆新车。FSD软件包升级一口价6.4万元,这样收入规模可见一斑。
最后在监管上,国内车企本身有更多的自由度。
比如近期,数据安全和道路信息采集的话题就备受关注。目前国内大多数厂商在做自动驾驶的时候,因为使用到了激光雷达,所以绕不开高精地图。相比普通的地图,高精地图拥有更精准的定位和信息,可以精确到厘米级。
“自动驾驶有两个基础功能,感知和定位。激光雷达可以不用高精地图做感知,当然效果会差一些。激光雷达做定位,需要依靠高精地图。”某自动驾驶工程师告诉虎嗅。
小鹏P7的NGP导航辅助驾驶功能,就已经采用了高德的高精地图。理想ONE即将推出的NOA,也来自高德支持。蔚来NOP,则是来自百度的高精地图。在高精地图的加持下,车辆拥有更精准的定位,从而可以产生更优异的决策规划,并提升驾乘体验的舒适性。
如果特斯拉,要走激光雷达+高精地图的路径实现高阶自动驾驶,特斯拉面临的可能不再是技术问题,而是监管问题。尤其是在中国,特斯拉虽然与腾讯地图、百度地图都有过合作,但目前仍未迹象表明会采用这两家的高精地图。
在国内,特斯拉就更不可能获得高精地图采集资质。而在全球范围内,特斯拉唯一能做的,就是通过车载摄像头来收集大量真实路况数据,业内称之为“众包模式”。正如马斯克所说:“8个摄像头在同一时间进行360度高帧速率视频的拍摄。”
“Tesla目前收集的数据是视觉+毫米波,质量确实相比有激光雷达的差。但是它依靠先进的自动标注、神经网络研发、超级计算机等能力,硬生生的用较差的数据训练出了很强的功能。”上述自动驾驶工程师补充道。
写在最后
特斯拉是一家什么样的公司?在过去几年一直有着不同的版本,从最早的电动车公司,到后来的能源公司,再到后来的软件公司。
从FSD V9的开始,特斯拉可能又换“帽子”了。正如马斯克在2021年第一季度财报电话会上所说的:“从长远角度来看,人们会发现我们是一家人工智能机器人公司。”
当然,我还是奉劝大家,少听听马斯克说了什么,多看看马斯克做了什么。