
巴斯大学(UOB)物理学家们领导的一项新研究介绍了机器人领域的一种新可能性。根据科学家们的说法,有一种方法可以将软体机器人包裹在材料中。这将允许创建由柔性材料制成的机械臂,由嵌入表面的机器人提供动力。
这项研究已发表在《科学进展》杂志上。科学家们表示,对活性物质的新建模将使人们有可能通过人类对其表面的控制活动来控制软固体的运动和形状。这项研究需要更多的发展,但是一旦它准备好了,人们相信它可以开始对如今机器人的建模方式进行重大改变。
巴斯大学科学家们在其帖子中写道:“普通软质材料的表面总是缩成一个球体。想想水珠变成水滴的方式:水珠的发生是因为液体和其他软性材料的表面自然收缩成最小的表面积--即球体。但是,活性物质可以被设计成与这种趋势相反。这方面的一个例子是,一个橡胶球被一层纳米机器人包裹着,机器人被编程为一致工作,将球扭曲成一个新的、预先确定的形状(例如,一个星星)。”
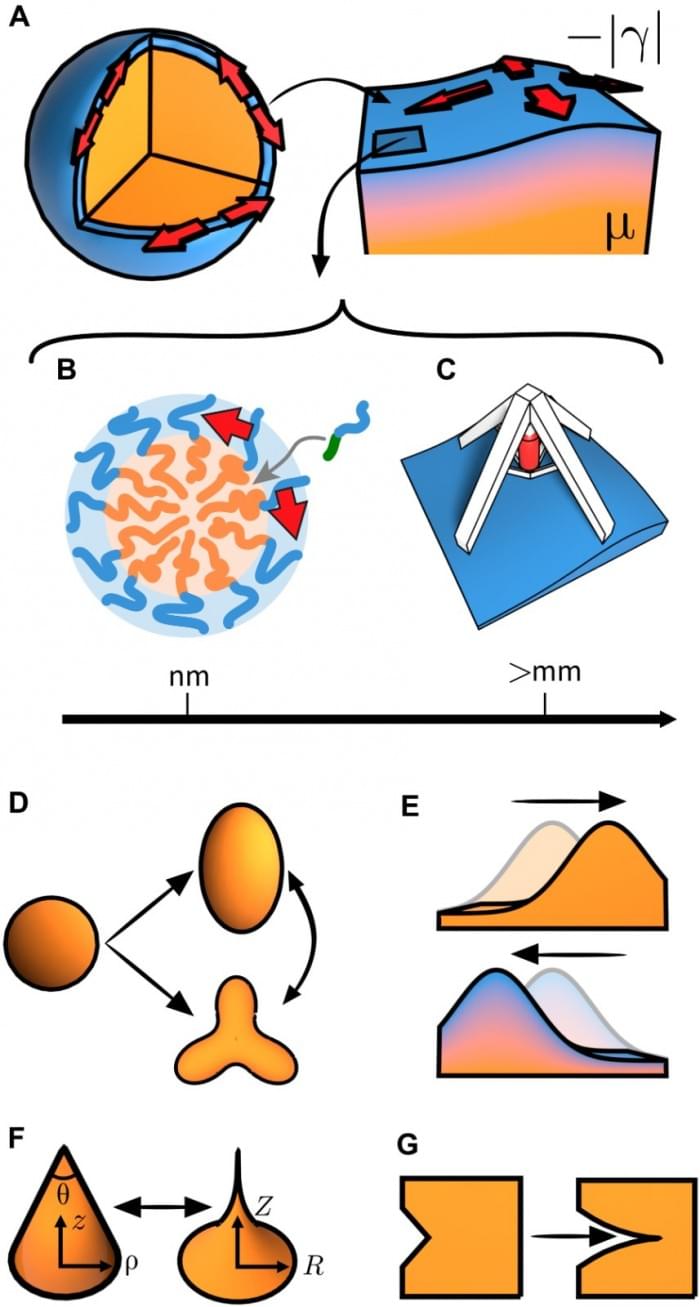
这一发现希望能帮助新的机器运动通过统一工作的各个活动单元进行控制。这与今天的机器相差甚远,因为它们的运动是由一个中央控制器决定的。科学家们将其与人类的生物组织如心肌纤维相比较。
“这项研究是一个重要的概念证明,具有许多有用的意义,”通讯作者Anton Souslov博士说。“例如,未来的技术可以生产出柔性机器人,这些机器人的体积要小得多,而且能更好地拿起和操纵精致的材料。”
巴斯大学表示,这项研究测试了关于液体或软固体表面能量成本总是正值的想法,因为总是需要一定的能量来制造一个表面。
“活性物质使我们以一种新的眼光看待熟悉的自然规则--像表面张力必须是正值这样的规则,”研究第一作者Jack Binysh博士说。“看看如果我们打破这些规则会发生什么,以及我们如何能够利用这些结果,这是一个令人兴奋的研究领域。”