
在近日发表于《传感器》期刊上的一篇文章中,佛罗里达大西洋大学的一支研究团队,详细介绍了基于软磁传感器阵列来打造人体脊柱复制品机器人的方法,以便预测手术后的椎间负荷与姿势。据悉,随着年龄的增长,人类脊柱上的椎间盘会趋于恶化,乃至需要动用手术来植入替代品。
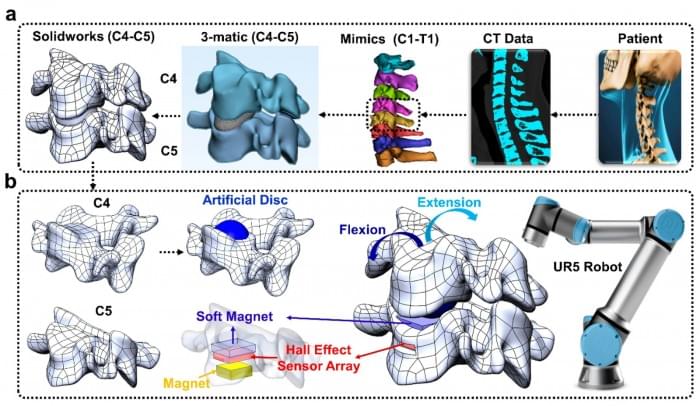
研究配图 - 1:基于 CT 扫描的机器人脊柱模型
好消息是,得益于能够模拟特定患者脊柱模型的软磁传感阵列机器人的出现,新方案将有助于医疗团队更好地预估此类手术的成功率。
Research Footage of the Robotic 3D Spine Twin(via)
佛罗里达大西洋大学(FAU)的 Erik Engeberg 教授,与来自马库斯神经科学研究所的 Frank Vrionis 博士,共同带领了这项新研究。
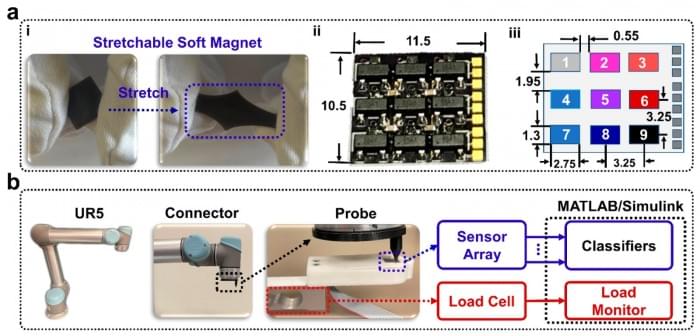
研究配图 - 2:软磁机器人可对外部负载的位置和幅度进行分级
科学家们首先对患者的脊柱展开 CT 扫描,然后借助计算机开展 3D 建模,最后 3D 打印出脊柱部分的关节模型。
聚合物模型包含了在两款椎骨之间的颈椎间盘植入物,其中含有的一系列软磁传感器,则由廉价的硅树脂与磁粉混合制成。
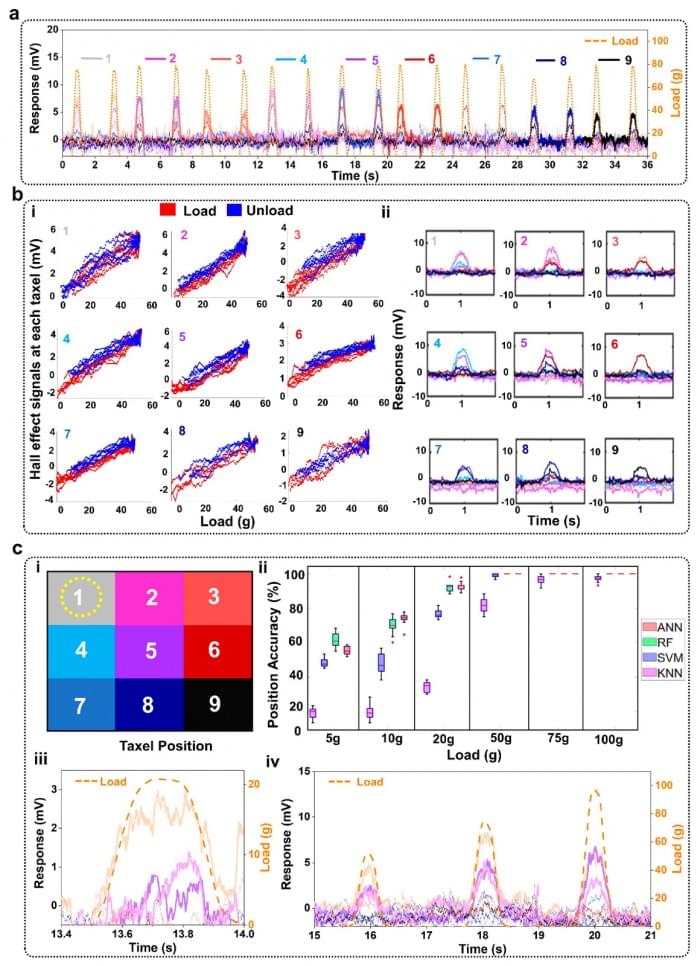
研究配图 - 3:10% 铁磁流体传感器阵列的分级精度
而后研究团队利用机械臂来弯曲和伸展脊柱复制品,以模拟五种不同的真实脊柱姿势 —— 居中、中屈、屈曲,以及中度和完全伸展。
期间传感器会记录植入物在整个脊柱上的压力分布方式,且实测发现准确度几乎达到了 100% 。
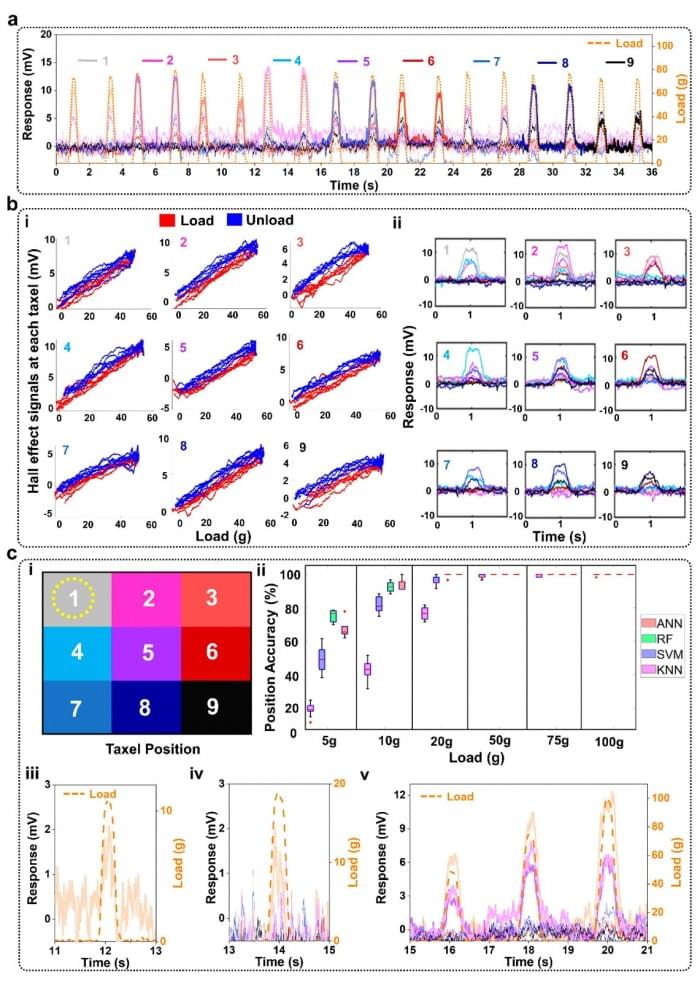
研究配图 - 4:15% 铁磁流体传感器阵列的霍尔效应 / 分级精度
展望未来,研究团队希望这项技术可被用于实际手术前的规划探讨和模拟实践,以找到最适合患者的手术替代植入物。
此外基于改模型开展的模拟,也能够让患者更好地了解其可在手术回复期间开展哪些方面的运动。
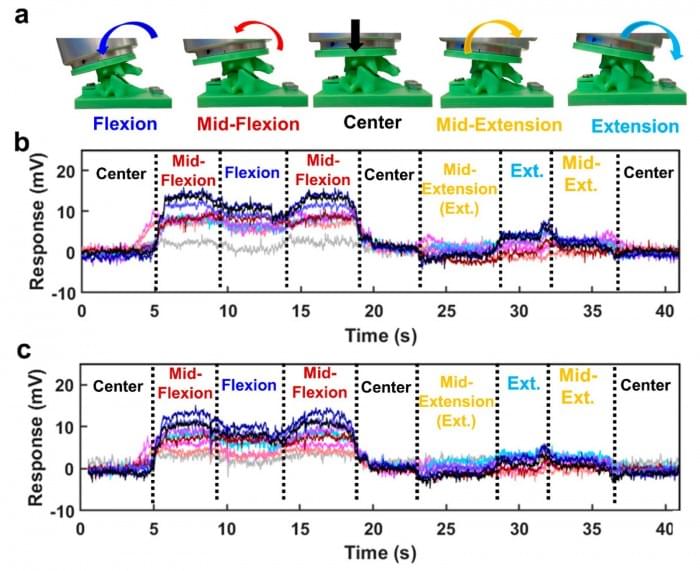
研究配图 - 5:人体脊柱复制品机器人的椎间监测 / 姿势测量
最后,有关这项研究的详情,已经发表在近日出版的《Sensors》期刊上。
原标题为《Robotic Replica of a Human Spine Uses Soft Magnetic Sensor Array to Forecast Intervertebral Loads and Posture after Surgery》。