
对于司机来说,视觉盲区一直是个相当危险的困扰。不过美国西北大学的一支研究团队,刚刚介绍了一种新颖的全息相机技术。通过重建散射光波来观察肉眼看不到的角落,这套系统能够更快地发现汽车或行人等快速移动的目标。
(来自:Northwestern University)
据悉,当光线照射到物体上时,就会发生散射。其中一些光线抵达了我们的视网膜(或相机传感器),最终形成了我们可看到的物体。
但也正因如此,我们无法看到被其它物体遮挡的目标,更别提透过雾气等散射介质。为了化解这方面的尴尬,一种可行方法是利用多个物体的光散射。
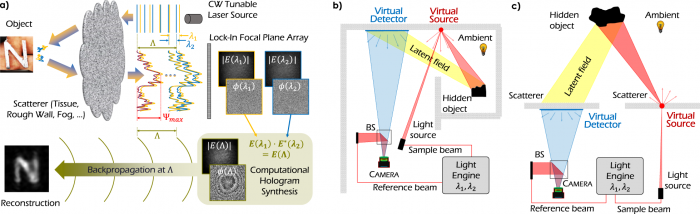
研究配图 - 1:NLoS 成像的 SWH 示意图
举个例子,将镜子放在恰到好处的位置,我们就可以看到拐角处的物体。不过就算没有镜子,这个原理依然适用 —— 只不过次要物体的散射光太多,导致我们无法轻松重建目标对象。
而美国西北大学研究人员使用的非视距(NLoS)成像技术方案,就可以通过主动发射光线、待其碰到物体并传回传感器,以更好地实现盲区目标检测。
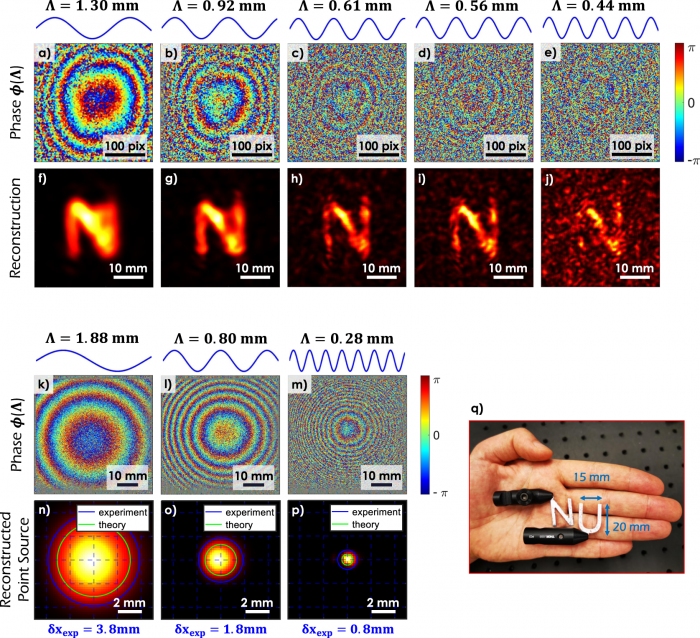
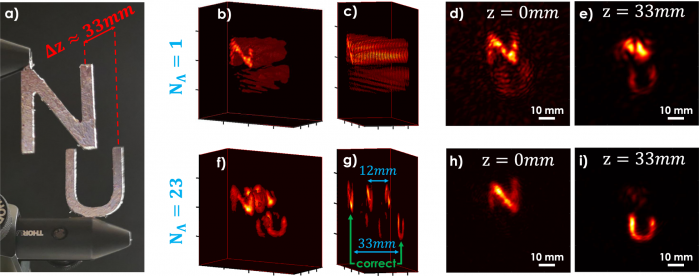
研究配图 - 2:SWH 演示实验 / 分辨率评估
显然,这需要借助一套特殊的算法,才能逆推出盲区拐角处的物体图像。此前也有类似的技术解决方案,但它们的分辨率通常较低、或需要耗费大量的处理时间。
相比之下,美国西北大学的 NLoS 方案不仅快速便捷,还能够在夜间或有雾天气良好工作。
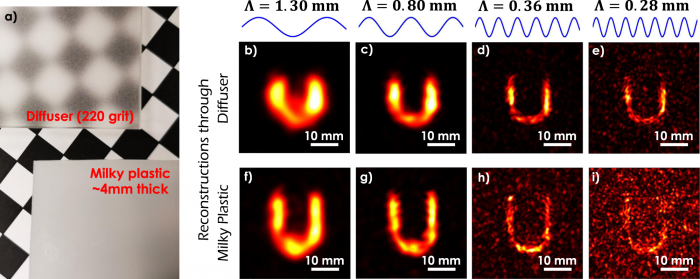
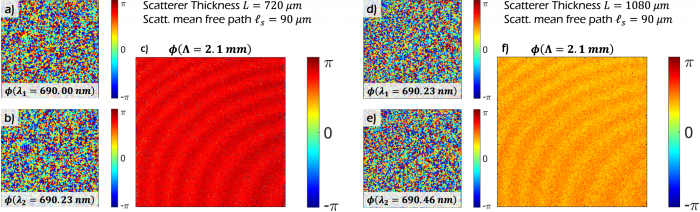
研究配图 - 3:SWH 散射介质成像演示
为改善两方面的问题,研究人员运用了所谓的合成波长全息技术。其工作原理是将来自两个激光器的光波合成到一起再发射,以产生在角落附近(或其它散射介质后面)的三维“全息”图像。
研究一作 Florian Willomitzer 表示:“如果你可以在全息图中捕捉整个物体的光场,就能够完整重建物体的 3D 形状”。
研究配图 - 4:合成脉冲全息实验演示
与普通光波相比,合成光波能够有效地对拐角处(或通过散射物体)对目标实施全息成像。
此外这套系统不仅能够捕捉到潜伏在大角度视野内物体的精细细节,响应速度也非常快 —— 通常可控制在 46 毫秒内。
研究配图 - 5:波前传感实验演示
通过多方面的持续改进,NLoS 方案可让汽车及时发现快速接近的汽车或行人,较其它动辄需要耗费一个多小时来计算的早期 NLoS 系统有了巨大的改进。
Florian Willomitzer 笑称,这项技术算是将墙壁也变成了镜子,且能够在夜间或有雾的天气状况下工作。
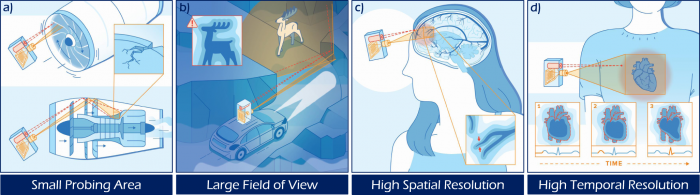
研究配图 -6:SWH 关键属性和未来潜在应用
最后,除了车载碰撞预警系统,他们也打算将之用于改进工业和医疗行业的内窥镜技术。那样摄像头就无需辛苦绕过弯曲的管道(或肠道),而是能够通过发射合成光、并观察它们是如何折返回来的,而实现拐角盲区的观察。
有关这项研究的详情,已经发表在近日出版的《自然通讯》(Nature Communications)期刊上,原标题为《Fast non-line-of-sight imaging with high-resolution and wide field of view using synthetic wavelength holography》。