
韩国机械与材料研究所的一项新电池设计,有望让软体机器人能够像蛇一样灵活行动,且不会被传统造型的电池组件和难以扩展的续航能力给拖后腿。在 8 月 16 日发表于《软体机器人》(Soft Robotics)期刊上的一篇文章中,研究团队提出了一种鳞片式的仿生形变电池概念。若顺利推广开来,其有望在软体机器人、可穿戴电子设备等领域发挥巨大的作用。
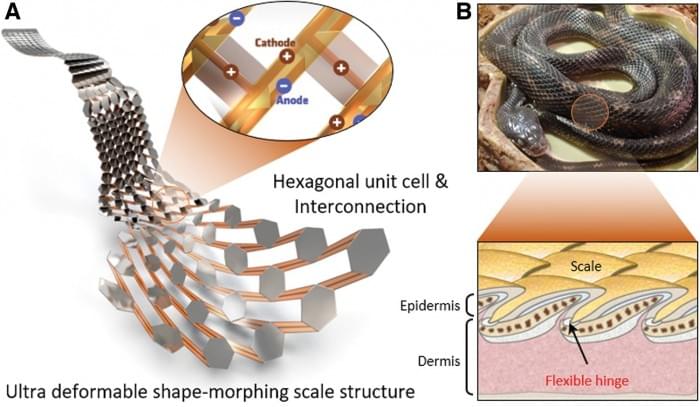
研究配图 - 1:基于蛇类鳞片灵感的超可变形结构
可以说,这套设想的本质,就是将一系列坚硬但很小的电池串接到一起,形成一组重叠的鳞片状结构,以使之能够随着设备而弯曲变形。
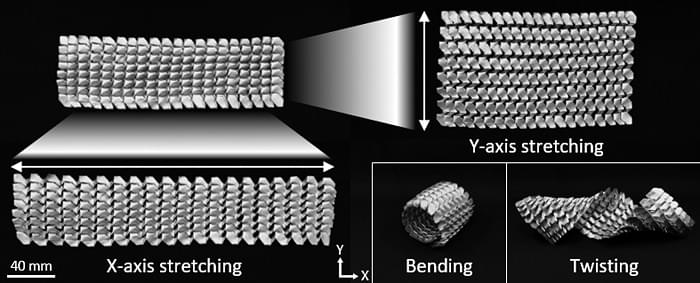
研究配图 - 2:模拟结构原型的 X / Y 轴示意
为实现这一目标,科学家们使用了小巧的六边形锂离子电池作为软体机器人的“鳞片”,并用聚合物 + 铜材将之连接到一起。
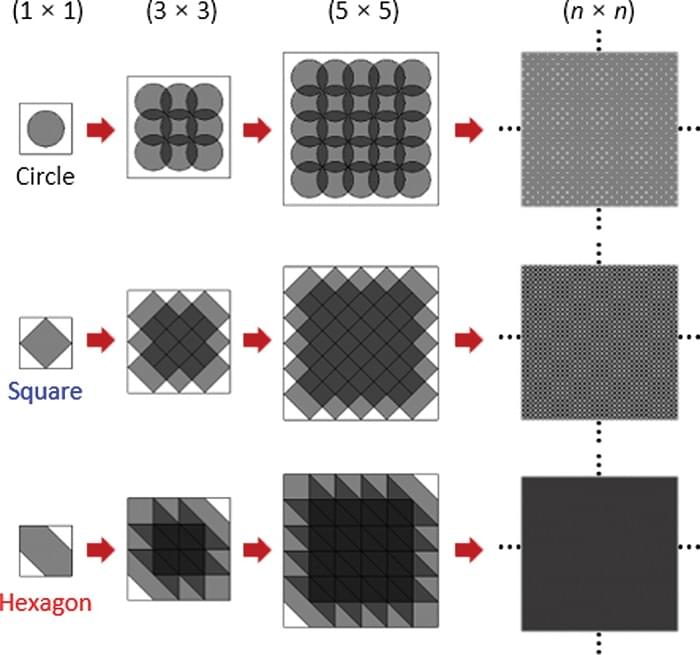
研究配图 - 3:面密度取决于电芯的形状
这些材料也能够作为铰链,以在不造成损坏的情况下,实现稳定的变形。
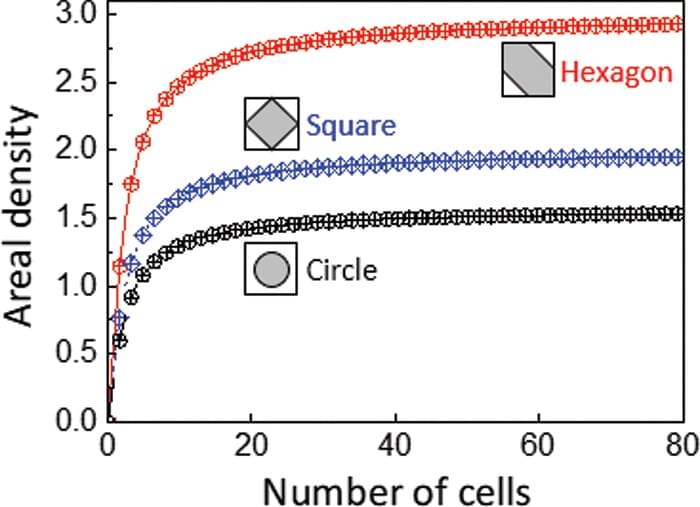
研究配图 - 4:电芯形状 / 面密度函数
每片六边形电池的形状,也经过了精心的优化,以最大限度地提升设备电池的整体容量。
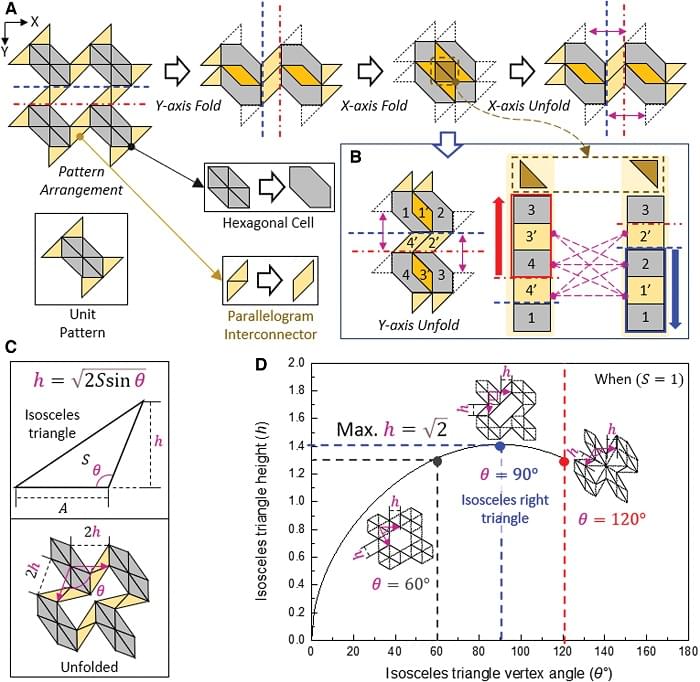
研究配图 - 5:电芯图案阵列设计的多轴变形图解
此外参照蛇皮模型的可拉伸锂电池,即使在弯曲产生形变的时候,也能够保持其性能。
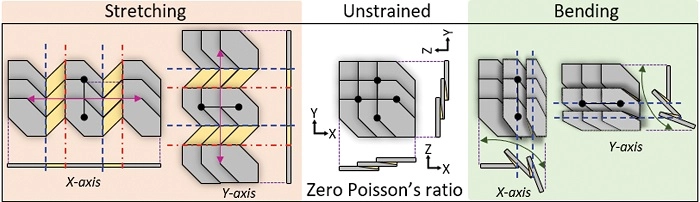
研究配图 - 6:拉伸弯曲双轴形变下的鳞片结构及其力学特性
测试表明,即使在弯曲变形和拉伸率高达 90% 的情况下,可拉伸锂电池也能在超过 36000 次循环的情况下保持其性能。
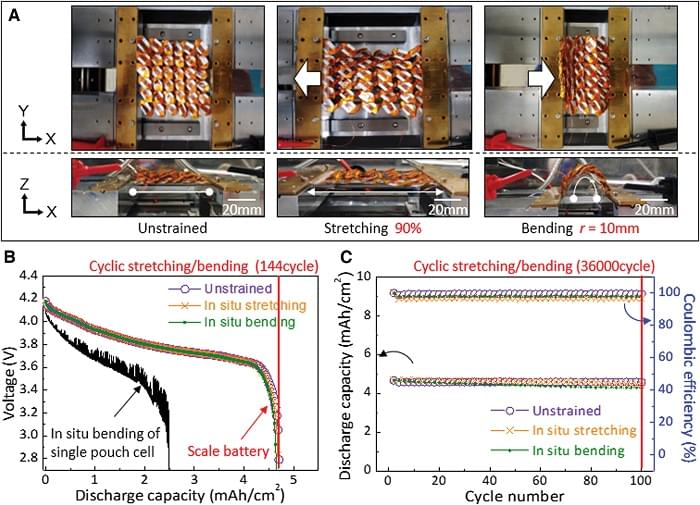
研究配图 - 7:电芯机械形变尺度 / 电化学性能
这样的特性,可让未来可穿戴设备和软体机器人都受益于此 —— 比如为老年患者提供康复服务的工作人员所使用的机器人。
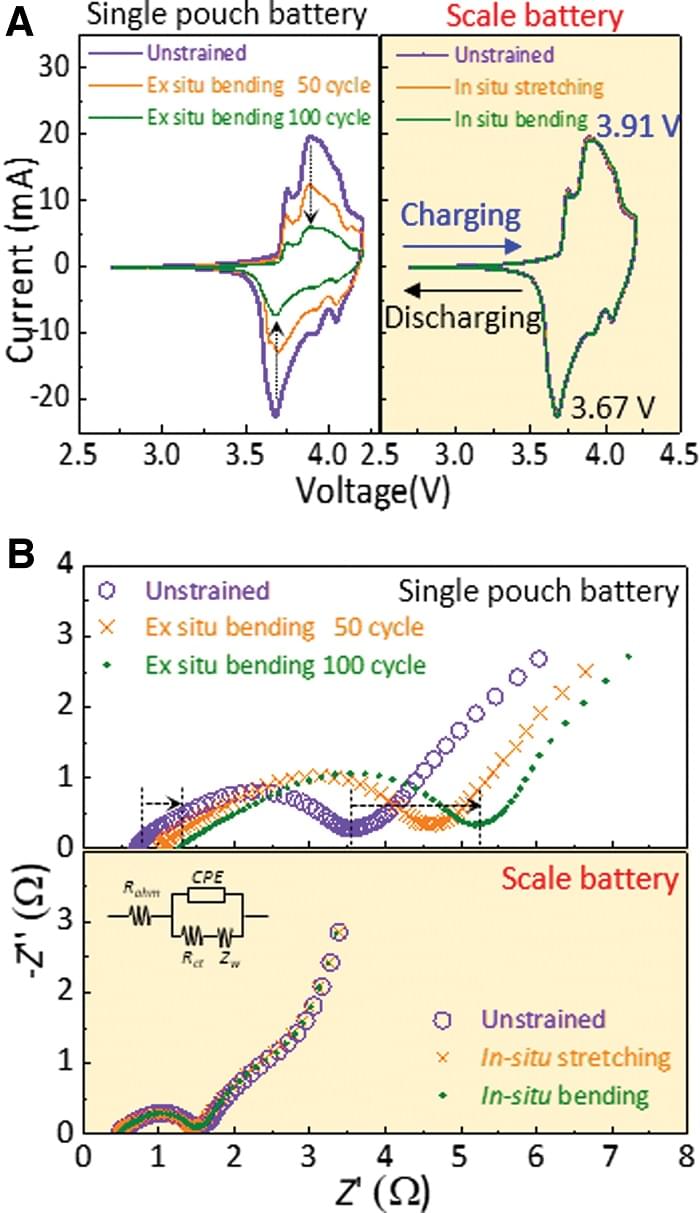
研究配图 - 8:电芯形变 / 电子阻抗
其它可能性还包括需要在灾难环境中穿过狭窄空间的搜救机器人,以及带有人造肌肉的多功能软体机器人。
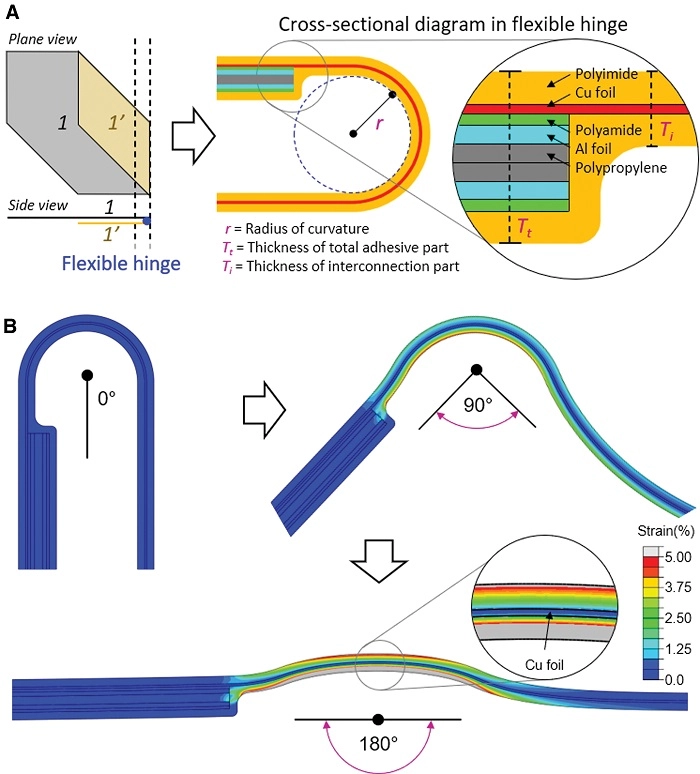
研究配图 - 9:柔性铰链的应变力评估
在向着这个目标努力前进的过程中,科学家们还希望进一步改进设计、以提升电池的存储容量。
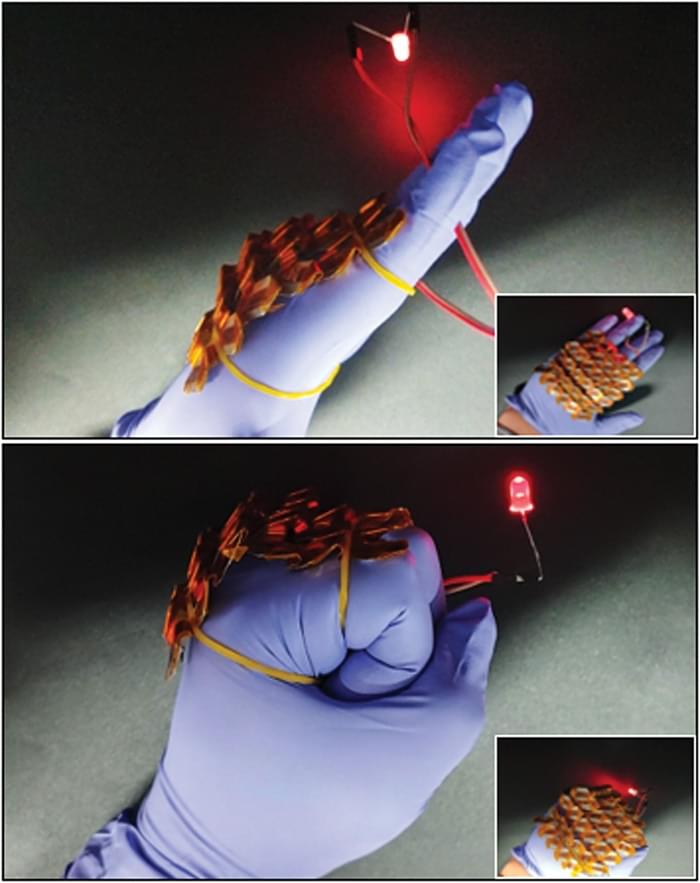
研究配图 - 10:手部柔性可穿戴设备演示
感兴趣的朋友,可移步至《Soft Robotics》,以查看《Bioinspired, Shape-Morphing Scale Battery for Untethered Soft Robots》全文。
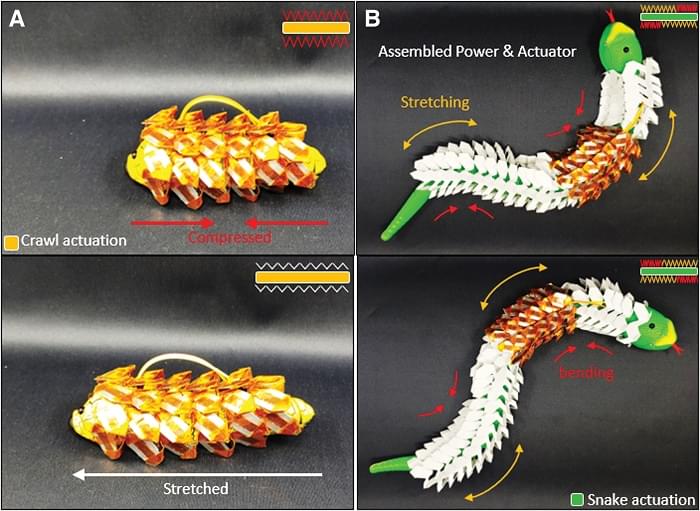
研究配图 - 11:无绳管状致动器(爬行示例)与覆盖了鳞片电池的软体机器人