
本文作者:轩元资本投研团队,编辑:适道,题图来自:视觉中国
比亚迪董事长王传福曾表示,“新能源汽车的上半场是电动化,下半场是智能化”。毫无疑问,新能源汽车智能化是抢占行业竞争制高点的关键领域。虽然中国新能源汽车在全球的竞争中已经赢得上半场电动化的先机,但智能化才是未来汽车产业决胜下半场竞争的关键。
2022年12月22日发布的《2023麦肯锡中国汽车消费者洞察》报告认为,中国车市正处于百年未有之大变局:在智能电动汽车的助推之下,市场格局及消费者的品牌认知与用车习惯正以前所未见的速度演变。在智能化的背景下,汽车产业价值链正在加快重塑,这对投资人而言,将会带来一系列新的投资机会。
轩元资本投研团队提炼出2023年新能源汽车产业链10大投资热点,分成电动化篇、智能化篇两个部分。电动化篇包括复合集流体、钠电池、固态电池、第三代功率半导体、分布式驱动等相关内容,本篇智能化由4D毫米波雷达、域控制器、线控底盘、汽车半导体、特定场景无人驾驶等内容构成。
4D成像毫米波雷达
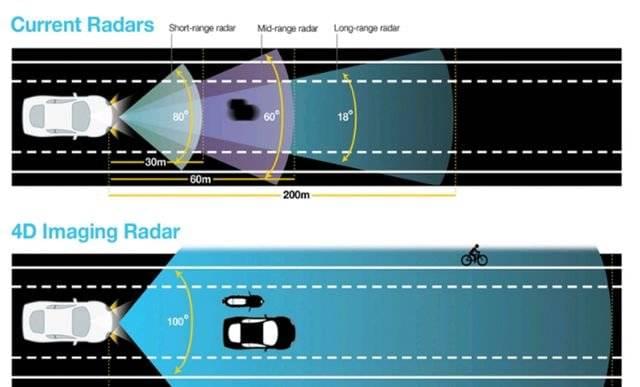
毫米波雷达是工作在毫米波波段探测的雷达,穿透雾、烟、灰尘的能力强,具有全天候、全天时的特点。车载毫米波雷达是新能源智能汽车ADAS系统感知层的重要组成部分,按照测量距离划分,有短距的SRR,中距的MRR,长距的LRR。
前向雷达采用77GHz或79GHz的频段,探测距离比较远,属于LRR,实现自主紧急制动(AEB)和自适应巡航控制(ACC)功能。角雷达采用24GHz的频段,属于SRR,实现盲区检测(BSD)、变道辅助(LCA)、交通警报(F/RCTA)等功能。

资料来源:汽车之家
目前的常见的车载毫米波雷达只能输出距离、速度和角度信息,所以也被称为3D毫米波雷达。而4D成像毫米波雷达,通过增加纵向天线,从而具备俯仰角测量的能力,实现被测目标高度数据的测量。
另外,4D成像毫米波雷达增加了天线数量与密度,使得角度、速度分辨率均有优化,且输出的点云图像更加致密,能够刻画更为真实的环境图像,可以有效解析测得目标的轮廓、行为和类别,适应更加复杂的道路,识别更多小物体,有效实现对被遮挡部分的物体及静止或横向物体的监测。
因此,相对于3D毫米波雷达,4D成像毫米波雷达不仅可以获得距离、速度、角度和高度等更多的数据,还可以提供点云图,有效解析目标物体的轮廓和类别。
资料来源:NXP网站
4D毫米波雷达优点:
1)具备测高能力,能够测量俯仰角度,可在150m处区分地物和立交桥。
2)探测距离更远,最多可以达到300米,同时兼顾水平视场角。
3)水平角度分辨率较高,可以区分300m处的两辆近车。
4)更高的点云质量,探测分辨率更高,更适合与深度学习框架结合。
4D成像毫米波雷达系统级联方案和超大阵列方案
级联方案就是将多个芯片模块级联,目前是主流趋势。2019年TI推出级联方案,通过将四个3发4收的单个MIMO芯片级联,可以构成12发16收的MIMO雷达阵列,雷达系统的虚拟通道数从12提升到了192,极大地提升了雷达系统的角度分辨率。
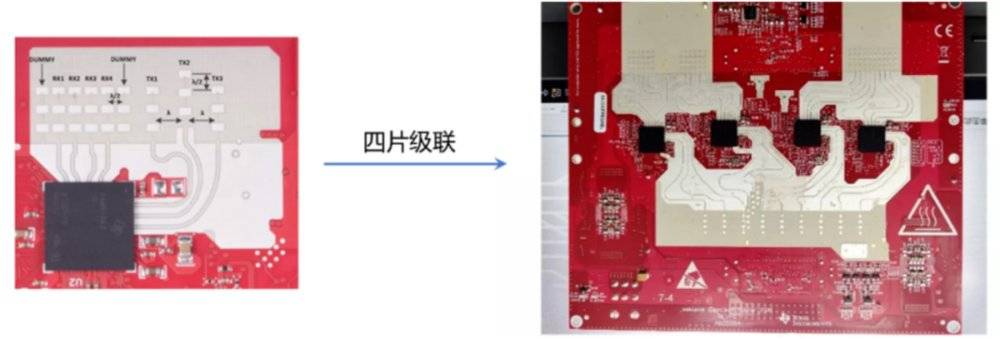
资料来源:佐思汽车研究
超大阵列方案则利用大幅增加收发通道的方式提高分辨率。如以色列Arbe公司开发出了目前最大的48发48收级联雷达系统方案,其虚拟通道数可以达到惊人的2304,大大的提升了毫米波雷达系统的角度分辨率。由于信号和数据量太大,Arbe开发了专用毫米波雷达处理器芯片。
虽然在车载3D毫米波雷达领域,国内外差距较大,被博世、大陆、安波福等外资垄断,但在4D成像毫米波雷达领域,国内创业公司跟国际巨头差距较小,有可能实现换道超车,实现车载毫米波雷达的国产替代。如木牛科技已经完成产品研发,能够提供近似激光雷达的高分辨率、高密度的4D点云信息,4D成像毫米波雷达即将在欧美市场批量出货。
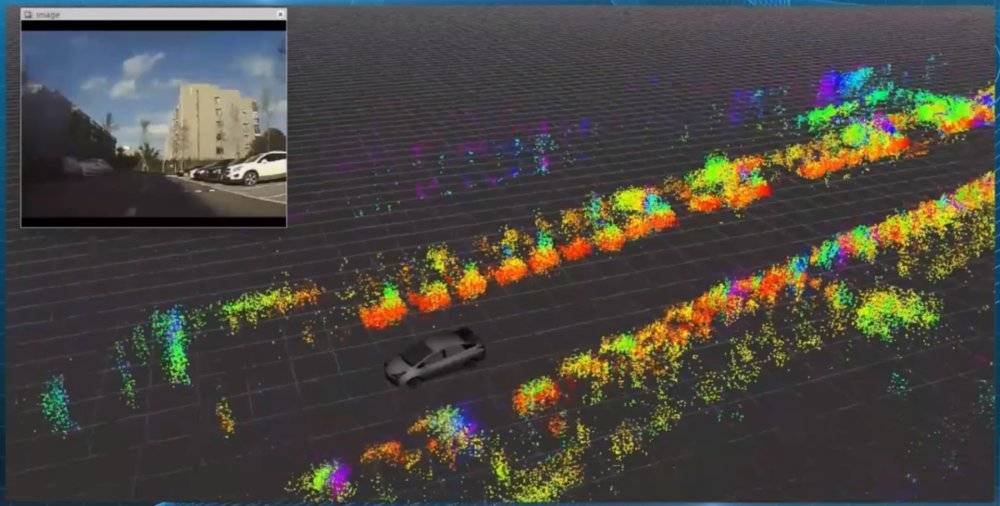
资料来源:木牛科技
目前的4D成像毫米波雷达,角度分辨率已经达到1~2度,基本达到8~16线激光雷达的水平,前者价格100~150美金,后者价格高5倍左右,达到500~1000美金。随着技术迭代降本、规模效应降本,4D成像毫米波雷达的价格可望降至数百元,有巨大的成本优势,将对低线束激光雷达实现替代。近期,有消息称特斯拉的自动驾驶系统(FSD)新方案增加4D成像毫米波雷达,这无疑将引领一波行业热潮。
据中金研究测算,2025年中国车载毫米波雷达市场规模将达到114亿元,2020-2025年复合增长率为19%。高工智能预测,国内市场L2+及以上新车搭载率有望在2025年突破50%。同时,4D成像毫米波雷达将从2023年开始小规模前装导入,全年搭载量有机会突破百万颗,到2025年占全部前向毫米波雷达的比重有望超过40%。
我们认为,4D成像毫米波雷达将处于爆发阶段,一方面,通过多维度的数据、高分辨率、点云图的高性能优势对3D毫米波雷达替代;另外一方面,通过高性价比优势,实现对低线束激光雷达的替代。
域控制器
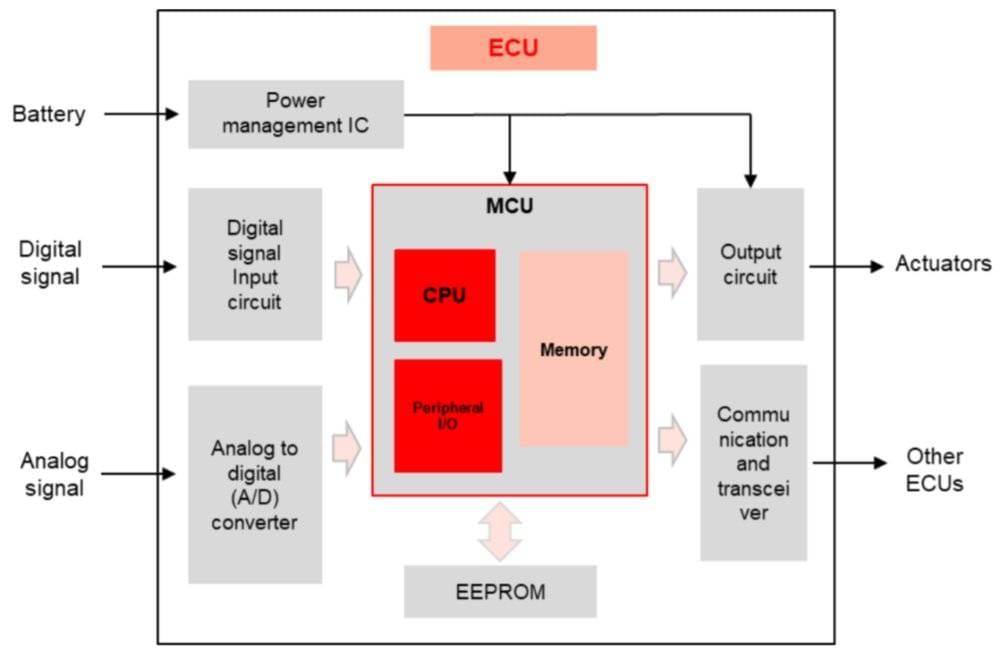
传统的汽车电子电气架构(EEA,Electrical/Electronic Architecture)是分布式,每个ECU 都是通过 CAN 总线或LIN总线连接,逻辑控制复杂,ECU难以统一维护,无法适应快速迭代。ECU来自不同供应商,有不同的嵌入式软件和底层代码,造成了相当大的冗余,共性部分无法复用。
在此背景下,博世、大陆、德尔福等Tier1厂商提出域控制器(DCU,Domain Control Unit)概念,通过利用处理能力更强的多核CPU/GPU芯片,使得DCU可以相对集中地控制每个域,从而取代传统的分布式电子电气架构。减少ECU的数量,系统管理会更容易,平台的可扩展性会更好。电子电气架构开始从传统分布式架构向集中式域控制器架构转变,再向未来的车载中央计算平台架构发展。

资料来源:博世
分布式电子电气架构朝域集中式电子电气架构演进主要有以下几点优势:
1. 提升算力利用率。域集中式的芯片算力的利用效率大幅提高;
2. 信息处理能力更强。单个ECU算力有限,域控CPU/GPU芯片能处理更大量的信息;
3. 方便OTA升级。分布式架构中ECU分散,域控制架构能够应对OTA的升级需求。
域控制器分为智驾域(ADAS)、座舱域、车身域、底盘域、动力域几个部分。根据行业调研,目前乘用车的车身域控制器单价在500元左右,座舱域控制器的单价在2000元左右,动力域控制器单价2000元左右,底盘域由于需要达到ASIL-D安全等级,价格在3000元左右,L2级自驾域单价2000元左右,L2+或L2++及以上的高阶智驾域控制器的单价在4000元~8000元左右,少数大算力的智驾域控制器超过万元。

资料来源:汽车电子与软件
智驾域(ADAS)控制器主要由硬件和软件构成,硬件包括PCB板卡、各种芯片CPU/GPU/MCU,以及各种电子元器件,软件包括虚拟化Hypervisor、底层基础软件BSP、实时操作系统ROTS、基于AUTSAR的中间件Middle Ware、上层应用算法等构成。
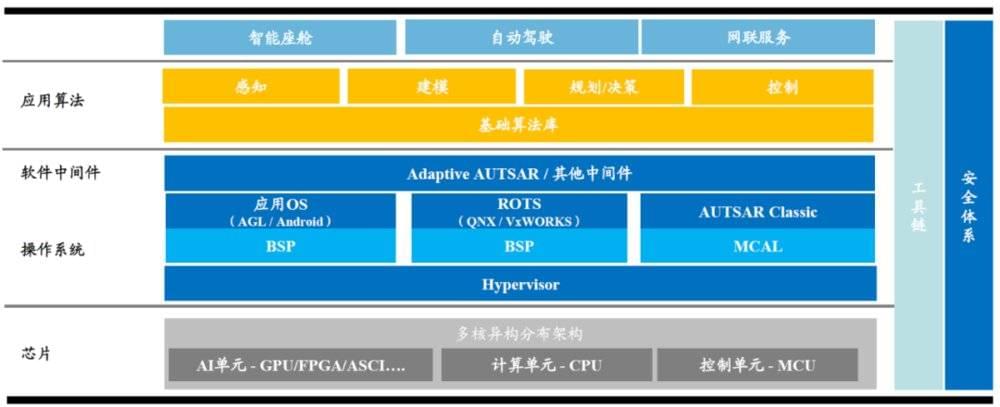
资料来源:中国软件评测中心
在EEA从分布式ECU向集中式域控制器演变的背景下,源自互联网的SOA(面向服务的架构)被引入汽车行业,使得汽车从面向信号的架构变成面向服务的架构,SOA架构具有动态响应、可重用性高、可扩展性强等优点。基于SOA软硬件实现解耦,使得软件定义汽车成为趋势,并给汽车相关软件带来新的投资机会。

随着新能源汽车渗透率不断提升,智能驾驶、智能座舱朝着高阶高算力的方向发展,单车域控制器价值量有小幅提升,再考虑到规模效应所带来的降本,预计各种域控制器单车总价值量保守预计在8000元左右,假设2025年新能源汽车销量达到1000万台、2030年销量达到1800万台,对应市场容量分别为800亿元、1440亿元。
我们认为,域控制器技术是一个门槛较高、行业天花板也足够高的领域,且正处在爆发阶段。一方面,新能源汽车渗透率在不断提升;另外一方面,域控制器在新能源汽车的渗透比例也在快速提升,属于“坡长雪厚”投资价值高的细分赛道。
线控底盘
汽车底盘是保证汽车正常行驶、承载发动机和车身核心部件的关键性集成平台。底盘的控制功能主要包含5个部分,分别是:制动、转向、换挡、油门和悬架。传统底盘存在大量的机械件、辅助件,结构复杂而笨重,体积大、成本高、维修难,机械件的灵敏度不够,无法满足智能驾驶的低延迟反应需求。
所谓线控底盘,就是对汽车底盘信号的传导机制进行线控改造,以电信号传导替代机械信号传导,从而使其更加适用于自动驾驶车辆。相较于传统机械式底盘,由电信号控制的线控底盘在响应速度、精度等方面具备更强的优势。
众所周知,智能驾驶的三大核心是感知、决策、执行。如果说感知相当于人的眼睛、耳朵,决策相当于人的大脑,那么底盘端的执行就相当于人的脚,对智能驾驶起着至关重要的作用。线控底盘是实现高阶自动驾驶的必要条件,也得到了政策层面的高度重视,属于急需解决的卡脖子领域。2020年10月,《新能源汽车产业发展规划(2021~2035年)》提出“三横三纵”的技术架构,强调线控执行系统是智能网联的核心技术。
在线控底盘中,线控制动和线控转向的技术门槛最高,主要被博世、大陆等国际巨头垄断,目前国产化率不足10%。线控悬架也值得关注,线控换挡和线控油门比较成熟,渗透率较高。从投资角度看,线控制动和线控转向是价值量和机会最大的领域。
汽车制动系统的发展主要经历了“液压制动—液压制动融合电控—线控制动”三个阶段,在电动化、智能化的浪潮下,复杂的、纯机械的传统制动系统存在机械传动慢、真空依赖、制动能量回收低、EVP振动噪声大、集成度低、扩展性差等诸多问题,已经难以满足汽车发展需要,电子信号代替机械液压方式对制动系统进行控制,势所必然。线控制动技术在智能驾驶时代的渗透率也有望大幅攀升。

资料来源:同驭汽车
执行层是汽车驾驶的最底层,因此智能驾驶所带来的转向系统与制动系统的变革,必将带来新的市场机会。
随着L2+智能驾驶的加速渗透,线控制动装配率迎来高速增长,已经成为实现智能驾驶关键一环。
线控制动的核心优势:
1)电信号传递只需要150毫秒,远快于机械连接400~600毫秒的响应;
2)线控制动更适应高集成的发展趋势,有利于实现底盘域控;
3)相对于机械制动,线控制动可以实现解耦,可扩展性更强。
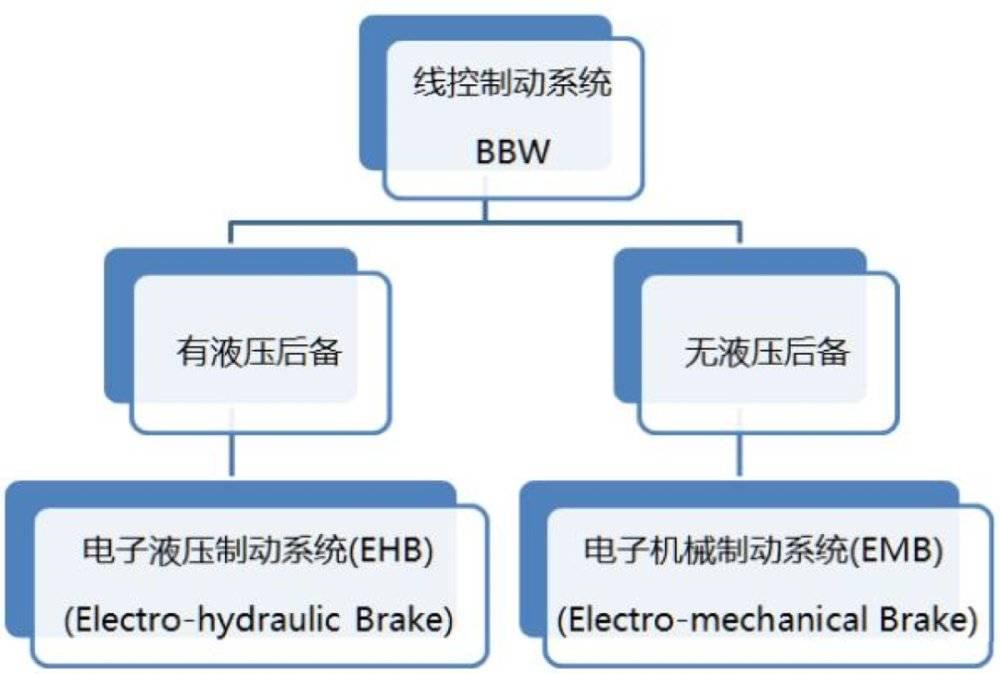
线控制动目前的主流方案是EHB(Electro-hydraulic Brake),远期将向EMB(Electro-Mechanical Brake)发展。EHB以传统的液压制动系统为基础,用电子器件取代了一部分机械部件的功能,通过电机转化为强大的直线推力,推动制动主缸推杆,是半电子化的方式。
EHB工作流程图及系统动力总成
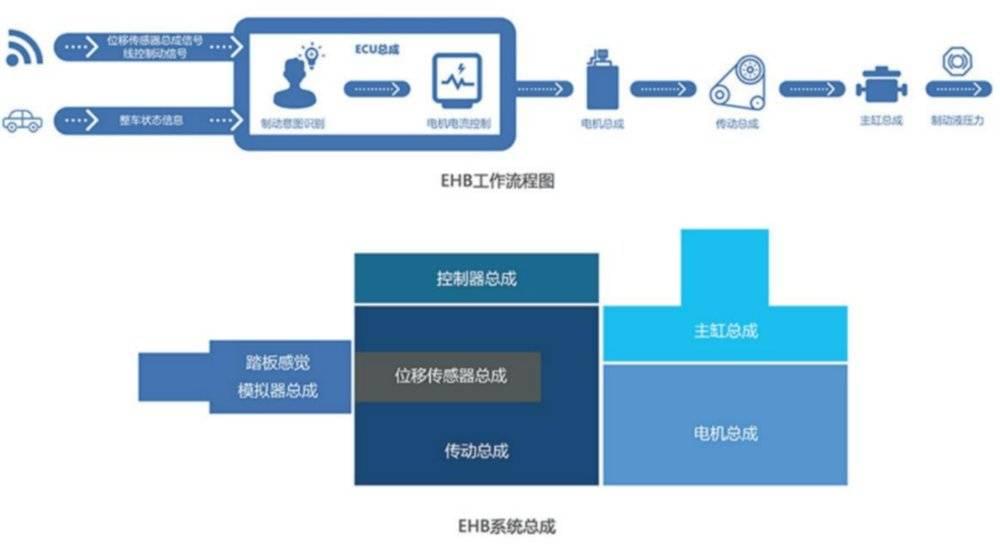
资料来源:同驭汽车科技官网
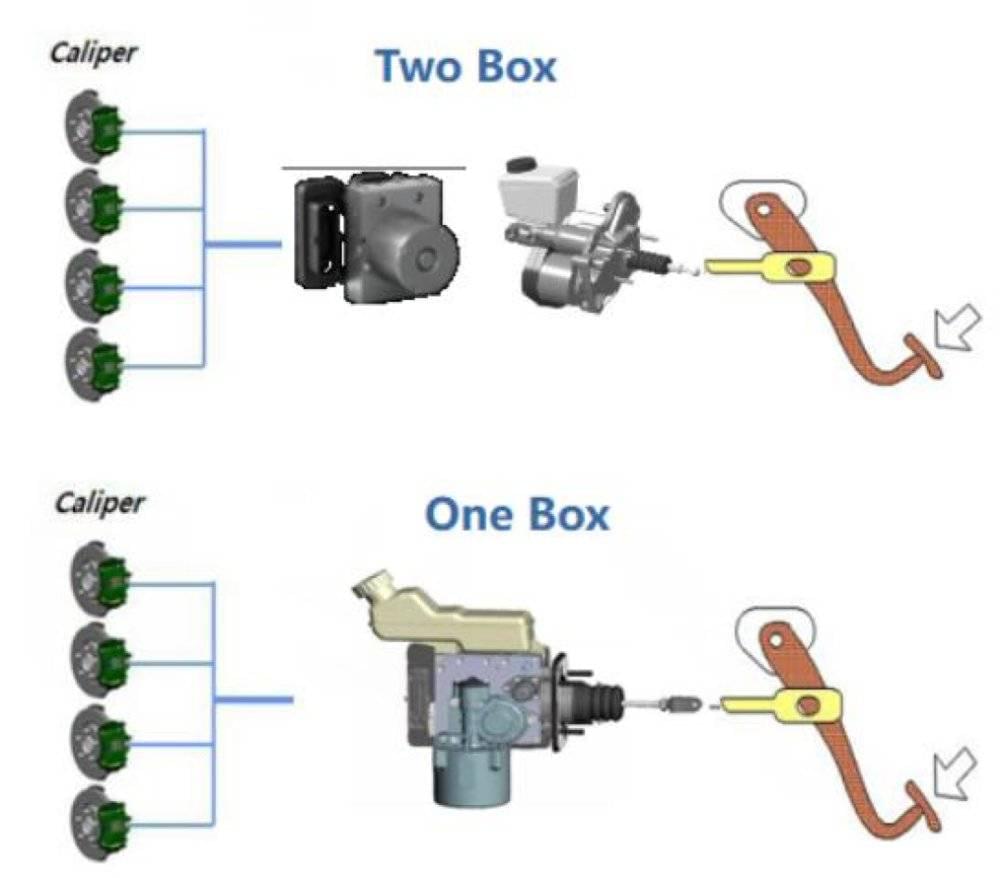
EHB又分为Two-Box和One-Box两种路线,短期以Two-Box为主,One-Box逐步起量,长期Two-Box和One-Box并存。相对于Two-Box,One-Box方案的优点是集成度更高、体积小及重量轻、能量回收效率更高且成本更低(例如博世的IPB比ibooster+ESP便宜300元左右),但缺点是没有冗余备份。
因此,One-box方案长期是行业未来的重要方向,尤其在成本敏感的中低端乘用车和商用车领域会进展较快,但基于安全和用户体验的考虑,一些中高端车型还是会选用Two-Box,所以中长期来看,两者会并存。
资料来源:汽车人高工
EMB从执行机构的差别上看,可以分成两类。第一类是电动机驱动执行机构然后作用到制动盘上,这类的优点,是结构和控制都比较简单,制动过程更稳定;缺点是电动机体积、质量、能耗都比较大;第二类是在前者的基础上增加一个自增力机构,它的优点是利用汽车的动能增加制动力度,减少电机体积和质量;缺点是制动控制的难度变大,制动稳定性也变差。
EMB制动信号直接输入到制动钳,完全电子化下,整合性及响应速度更为精进,但囿于短期成本较高,应用推广受限。另外,相对于EHB而言,EMB没有液压后备,如果电路出现短路、断路、电源出现问题,制动系统无法工作,带来的诸多安全隐患,也影响应用推广。
资料来源:汽车人高工
线控转向与汽车制动系统类似,转向系统也经历了“机械式—电子辅助式—线控式”的发 展历程,EPS仍是当前主流解决方案,但在智能驾驶驱动下,线控转向系统(SBW,Steering-by-Wire)必将是未来的发展趋势。
国内的线控转向行业也处于逐步放量阶段,国内不少创业公司陆续实现量产,未来会逐步对博世、捷太格特等公司产品进行国产替代。
电动助力转向跟线控转向系统的结构示意图
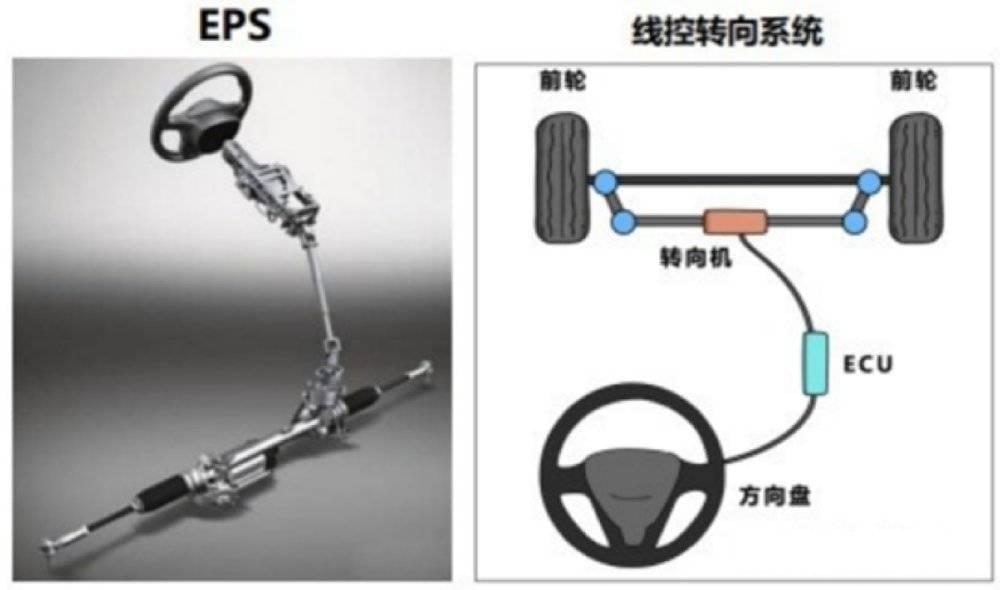
资料来源:汽车人高工
无论是线控制动还是线控转向,都被外资高度垄断,有确定性的国产替代机会。下游OEM基于担心被卡脖子,从成本角度考量,正在逐步接受、扶持国内创业公司,所以这些领域的创业公司迎来了难得的窗口期。
我们认为,线控领域将会打破垄断,并实现相对高比例的替代,也将给投资人带来非常好的投资机会,其投资逻辑跟汽车半导体很相似。
汽车半导体
在新能源汽车电动化、智能化的趋势下,整车芯片的价值量将不断攀升。根据海思在2021中国汽车半导体产业大会发布的数据, 预计2030年汽车电子在汽车总成本中的占比会达到50%。中国汽车工业协会数据显示,传统燃油车所需汽车芯片数量为600~700颗,电动车所需的汽车芯片数量将提升至1600颗/辆,而更高级的智能汽车对芯片的需求量将有望提升至3000颗/辆。
汽车电子占车辆总体成本百分比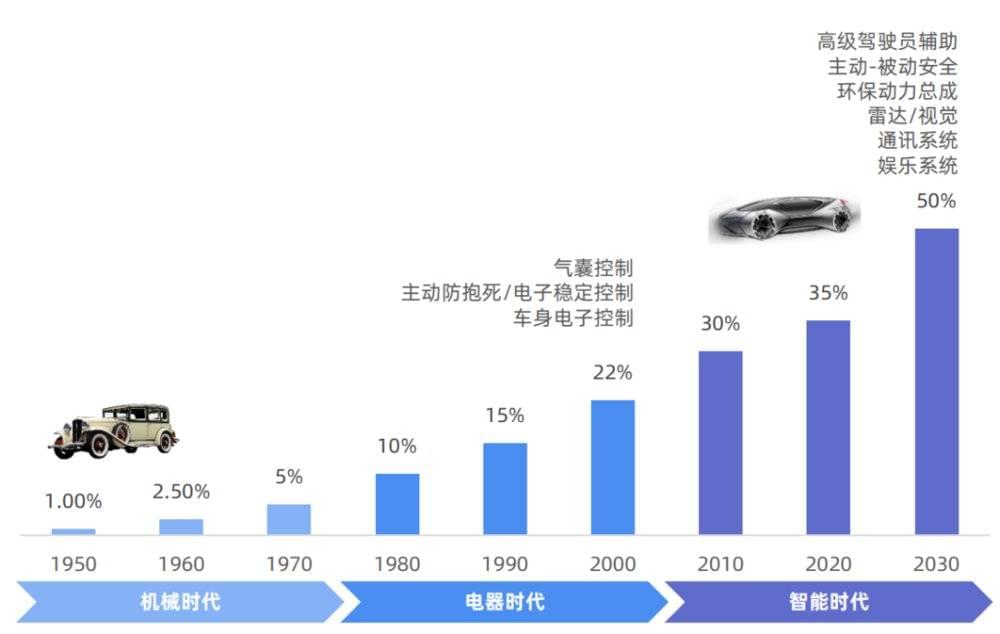
资料来源:2021中国汽车半导体产业大会、华为海思
汽车芯片大致可以分为主控芯片、功率芯片、 存储芯片、通信芯片以及传感芯片五大类。国产替代背景下,供应链自主可控进一步加速了国内汽车半导体市场的蓬勃发展。

资料来源:汽车芯片应用牵引创新发展论坛,广汽研究院
主控芯片:外资高度垄断,国产化率不到1%。CPU、GPU等高算力在技术封锁的背景下,挑战较大,MCU可能进展快些,上市公司、创业公司陆续实现过亿销售额。
存储芯片:外资占比较高,国产化率8%,随着部分消费类存储芯片厂商进军车规类市场,后续有望快速渗透,有望实现自主可控。
功率芯片:国内企业取得一些突破,国产化率8%,上市公司、创业公司在该领域可能快速占领较大市场份额,第三代半导体有望缩小差距。
传感器芯片:外地高度垄断,国产化率4%左右,在摄像头领域芯片有一定进展,激光雷达芯片代差不大,可能存在超越的机会。
模拟芯片:外资高度垄断,国产化率低于5%,电源管理领域芯片有一些进展,通信相关的难度较大。
主控芯片中,智能驾驶SOC芯片挑战最大,也最有想象空间。对于智能驾驶SOC芯片,各大车企采取不同的策略。特斯拉2019年后走向自研的道路,2022年前后,相当部分车企转向,采用的英伟达SOC芯片,而部分新势力如小鹏、蔚来采取自研SOC芯片的策略。由于自动驾驶SOC芯片技术门槛高、投入大,除了少部分车企走自研路线外,大部分车企不具备自主研发的能力。

资料来源:汇丰银行中国汽车半导体报告
国内汽车MCU市场被英飞凌/NXP/ST等海外巨头主导,90%以上市场为国际汽车零部件供应商占领,国产替代空间巨大。下游客户为保证供应链安全,也逐步接受国内产品,汽车MCU国产化进程加速启动,未来几年有望达到30%的国产化率。
资料来源:NXP网站
智能汽车EEA架构向域和集中式架构演变,各种传感器产生大量数据,提高了对高带宽、低延迟和低干扰连接的需求等级,原有的CAN通信不满足需求,以太网被引入车载领域。以太网PHY和交换机芯片市场由Marvell、Broadcom、NXP、TI和Microchip等主导,国内通信背景的创业公司正在尝试导入,单车价值量接近600元。
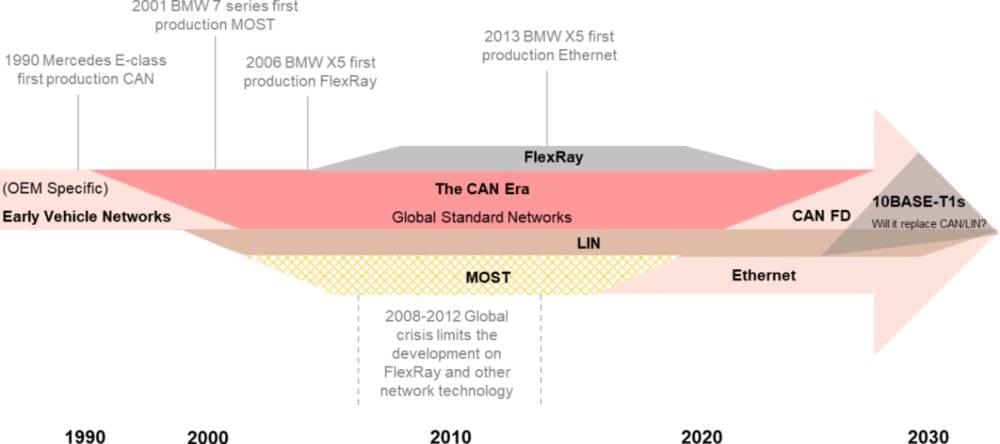
资料来源:汇丰前海证券
随着智能汽车销量不断上涨以及单车芯片使用量成倍增长,汽车半导体是未来最具潜力的领域。根据Strategy Analytics和HSBC预测,预计到2028年,单车芯片价值量将达到1000美元,中国汽车半导体市场将达到1030亿美元。
我们认为,在主控芯片领域的智驾、座舱芯片向头部集中,而车规MCU市场将会容纳多个玩家;在模拟芯片领域,如与信号链、电源管理相关,在传感器芯片领域,如毫米波雷达芯片、激光雷达芯片等赛道,尽管市场天花板不高,但挖掘细分行业龙头,也是不错的投资选择。
特定场景无人驾驶
根据国际汽车工程师协会SAE制定的标准,将智能驾驶分为Level0-Level5几个等级。Level3是重要的分水岭,Level3之前,责任主体在驾驶员,Level3及以后,责任主体在OEM。我们常说的智能驾驶主要指L3以下的辅助驾驶(ADAS),而无人驾驶一般指L4及以上自动驾驶。
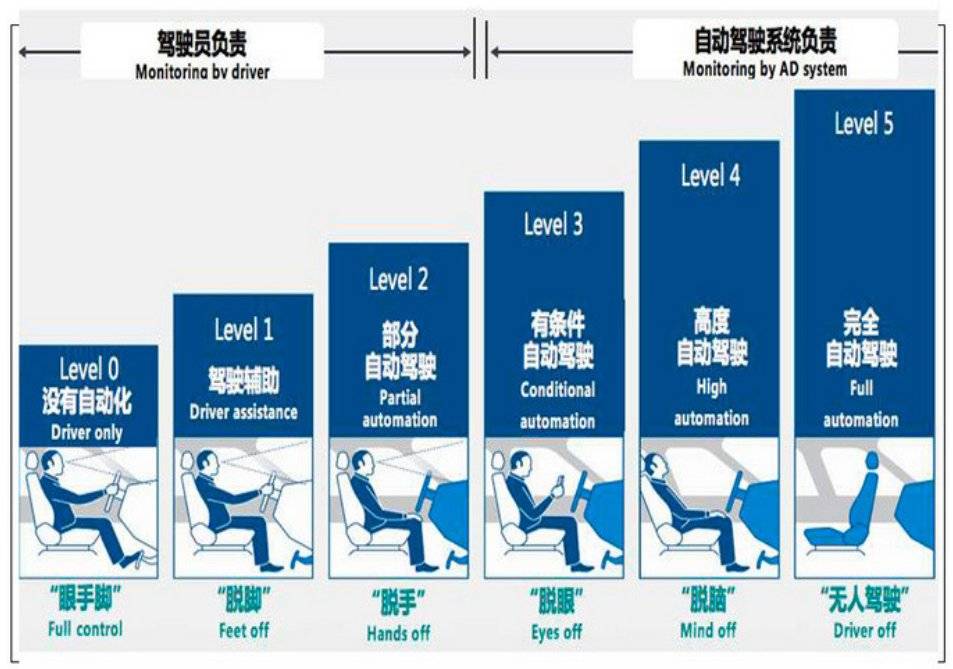
资料来源:前瞻研究院
辅助驾驶经过多年发展,已经从初级的L1持续迭代发展到目前的L2+,尽管业内不少OEM将智驾域控制器的硬件预埋到L3甚至L4,但只能称之为L2+,需要等相关的法规配套完善后才会突破L3。无人驾驶在公开场景尚存在大量corner case需要解决,但不少特定场景的无人驾驶创业公司经过多年基于L4层面持续研发和迭代,不断进行场景打磨、算法模型优化,取得了不错的进展。
相对于公开场景无人驾驶,特定场景不涉及公共道路安全法规且活动区域相对可知可控,技术难度较小,可实现快速落地,但仍存在较高的技术壁垒,必须对场景需求有深刻理解,才能解决长尾问题,打造适配场景的解决方案。
特定场景无人驾驶按照市场容量,从大到小排序,可以分为万亿级的RoboTruck、RoboTaxi;千亿级的矿区、环卫、末端配送;百亿级的港口、园区。
在供给端,随着技术的成熟度提高,已经具备落地的可能性;系统成本在不断的cost down,尤其硬件成本这几年价格下降较快,比如激光雷达从当初小几万降到目前的几千元。
在需求端,不同的场景都存在各种各样的痛点,还有部分场景的政策驱动也很明显,比如矿区、港口,一方面要打造智慧矿山、智慧港口,另外一方面频发的安全事故,让各方面急需推动无人化。

资料来源:轩元资本
RoboTaxi、RoboTruck
颠覆未来交通和出行方式
市场空间达到万亿级
场景复杂度高,高速行驶
高技术门槛,高算力要求
培育新业态、新商业模式
矿区、港口
存在安全隐患,时不时出现人员伤亡,业主方、运营方最大痛点
工作枯燥、环境不友好,尤其矿区的工作环境比较恶劣,招工难。
政策推动打造智慧矿山,智慧港口,实现无人化作业。
场景复杂度较高,低速行驶
较高技术门槛,较高算力要求


资料来源:轩元资本团队调研内蒙白云鄂博矿区无人驾驶
末端配送、环卫
解决劳动力不足,人员不易管理的问题
场景复杂度较高,中低速行驶
较高技术门槛,较高算力要求
末端配送之前存在路权问题,目前已开放
我们认为,特定场景无人驾驶技术逐步成熟,具备落地前提,处于经济效应的拐点,迭加政策驱动,该领域即将处于爆发阶段。场景越简单、痛点越明显的领域更容易、更快商业化落地;场景越复杂、痛点不那么明显的领域商业化落地相对慢些。大部分特定场景存在Tier 1和运营方两种商业模式,长期而言,后者的护城河较深。
上篇请见:电动化篇
本文作者:轩元资本投研团队,编辑:适道