
本文来自微信公众号:量子位 (ID:QbitAI),作者:杨净、丰色,头图来自:unsplash
100%纯视觉信念者马斯克,现在扔掉了最后一个雷达。
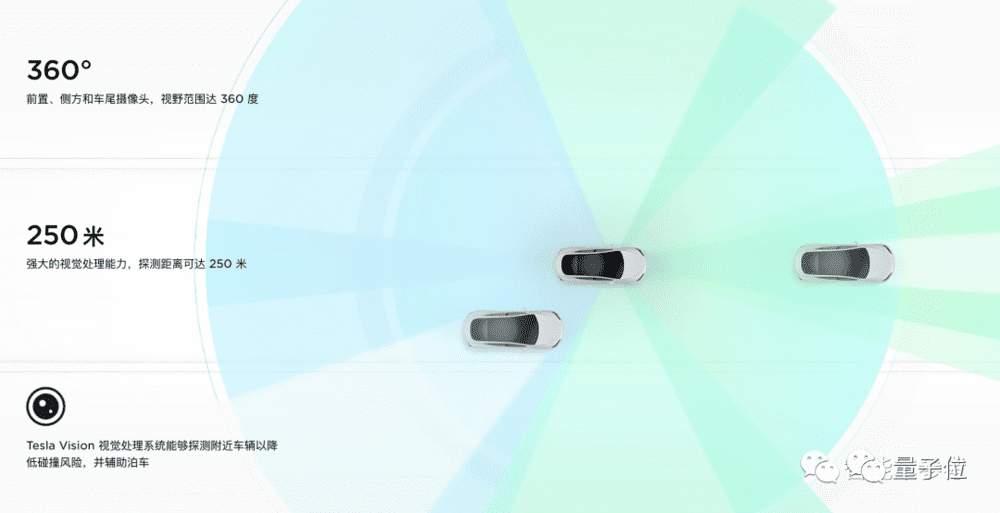
如今的特斯拉传感器方案,有且只有8个摄像头,换而言之不论是L2级的辅助驾驶还是无人驾驶能力的FSD,都完全靠这8个摄像头。
而被他扔掉的,正是雷达三剑客中性价比之王——超声波雷达。
它售价不过数十元,部署一整套自主泊车系统也不过500块,跟毫米波雷达、激光雷达相比不足为道。
更有人直言:超声波雷达只有好处,没有坏处。
而结合上次马斯克扔掉毫米波雷达,网友们更是坐不住了:
“幽灵刹车”到现在还无解呢。
但即便如此,特斯拉纯视觉方案仍在推进。而马斯克曾痛斥的雷达“阑尾”,现在也割干净了。
售价只有数十元的超声波雷达
先来看看这次被扔掉的主角——超声波雷达。
事实上,相较于自动驾驶中更常提及的激光雷达、毫米波雷达,超声波雷达在汽车上的应用已经很成熟了,而且堪称“性价比之王”。
它的工作原理很简单,顾名思义就是通过计算发射和接收超声波的时间差来测量距离。探测范围可在0.1-3米之间,精度可达1-3厘米,而且防水防尘,即便有泥沙遮挡也可以探测。
通常超声波雷达会布置在前后保险杠上或者车侧方,前者用于测量前后方障碍物,因此也叫做倒车雷达UPA;后者则是来测量侧方的障碍物,业内称其为APA,探测距离更远,通常在0.3-5米之间。
在智能车应用中,主要有自主泊车、辅助驾驶、自动紧急制动、辅助变道等场景。
以自主泊车为例,一套倒车方案需在汽车后保险杠配备4个UPA;自主泊车则是在此基础上,再配备4个APA,和前保险杠的4个UPA。
而之所以称之为性价比之王,是因为有如此应用同时,它的成本却很低。
市面上,单个超声波雷达售价仅为数十元,倒车方案可能在200多块,自主泊车整套方案差不多到500元——而且这还是一般价格,特斯拉这样的量产大户还可以有更低的成本供应价。
特斯拉自开启量产车车型交付以来,最初搭载的是博世提供的第五代超声波传感器,最小测距15厘米(精确测定),目标物检测最小3cm。
其后也用过法雷奥的超声波传感器,据称最大探测距离可以实现8米。并且超声波雷达的数量,很早就稳定在了12颗。
不过,超声波雷达也有一定局限性。最显著的就是超声波的传播延迟。
超声波的传播速度慢,误差大。不同于其他两种雷达的波速为光速,超声波雷达传播波速为340m/s左右,而且随着环境温度的不同还会改变。
这要是放在汽车高速行驶过程中,就无法实时感知到汽车车距变化。而且超声波是机械波,传播需要介质,很容易受到周围环境,尤其是天气的影响。
除此之外,还存在方向性差的问题。单个雷达无法精确描述障碍物的准确位置,需要更多设备来覆盖同一区域。
就整个行业而言,据中商情报网统计,当前国内在售车型的倒车雷达渗透率已接近100%;自动泊车系统渗透率预计在2025年将达到50%,整个市场规模预计今年(2022)将增长至58.4亿元。
目前市面上主流方案,是配备12超声波雷达方案。据国信证券数据显示,该方案渗透率将从2019年的9.6%提升到2025年的26.1%。
不过,相信自动驾驶应和人类一样是靠眼睛开车的马斯克,一直不看好靠雷达的自动驾驶方案,他曾狂言“用激光雷达的都是傻子”,还将它们比作人身上长的阑尾,可见其嫌恶。
现在,超声波雷达和毫米波雷达两个“阑尾”终于全部被马斯克痛快割掉。
特斯拉这下真纯视觉了
只剩8个摄像头的特斯拉真的要奔向纯视觉方案了。
根据官方通告,从本月开始,面向北美、欧洲、中东和中国台湾制造交付的Model 3和Y都将采用这一方案,不再配有超声波雷达,2023年开始面向全球交付的Model S和X亦是如此。
不过目前,中国制造的特斯拉的情况还未确定。
一个可能的原因是,随着我国智能车相关的监管加强,移除固有传感器这样的举动,需要报备和审批,经过监管部门认可批准后才能进行。
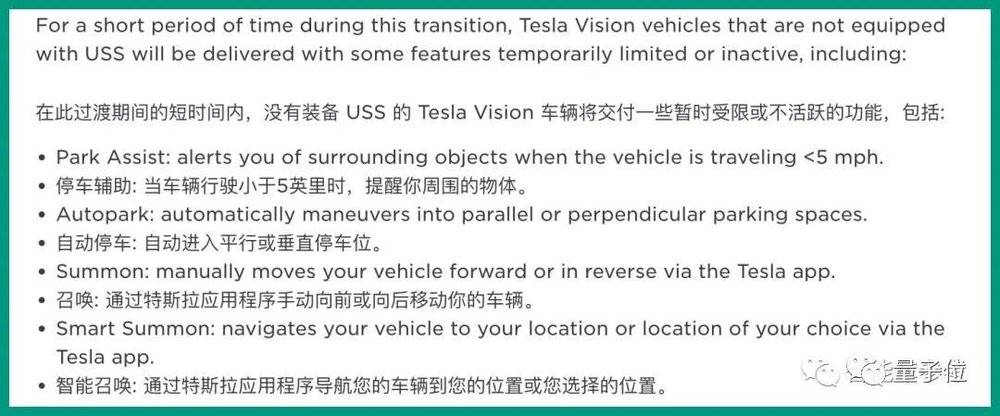
特斯拉这份公告还指出,移除超声波雷达后,升级为“Tesla Vision”系统的车辆将面临一段短暂的过渡期。
在此期间,停车辅助、自主泊车、智能召唤等方面的能力会受到影响。
当然,已售车辆的超声波雷达及其相应功能不会被停用。
针对这一操作,不少人可能会想起去年特斯拉在去掉毫米波雷达后,新增的不少幽灵刹车事件,不由得担心这次又会出什么问题。
不过,特斯拉有特别说明,超声波雷达的剔除不会改变特斯拉的碰撞安全评级。
而在今年CVPR中,特斯拉公布了一个新算法:Occupancy Networks,据称可以理解车身周围物体占多少空间,以及预测接下来行动轨迹和占用空间,代替雷达感知避免纯视觉方案的盲点(Corner Case)等问题。
多传感器融合还是纯视觉?
毋庸置疑,相较于特斯拉这一“剑走偏锋”的纯视觉思路,国内众多车企都还是坚持多传感器融合,摄像头和雷达一个都不落。
比如小鹏,其最新旗舰车型G9就搭载了2个激光雷达、12个超声波传感器以及12个摄像头。
再如蔚来ET7,身上更是有1个超远距激光雷达、5个毫米波雷达、12个超声波传感器以及14个摄像头。
如今马斯克丢掉最后的超声波雷达,实现纯视觉终极方案,再度引发关于两个不同路线方案的讨论:
纯视觉还是多传感器融合?
前者的反对者依然不少。最绕不过去的,就是安全问题。
比如面对摄像头上有污点这种情况,知乎网友@高岩就拿“人眼”做比喻,称虽然说人眼被挡住一只还能正常走路,但对于机器来说,这需要消耗巨大的算力来识别、判断,而且有很大概率无法判断导致退出自动驾驶条件,或者它还可能直接把黑点当作污染或者干扰因素过滤掉,保证自动驾驶能继续执行。
他指出,这就是为了易用性牺牲安全性,保证更好的自动驾驶体验。
或者更直接一点,有人指出马斯克这波“减配不减价”的操作,就是为了省成本。
这一点上,有不少中外网友所见略同:
当然,支持马斯克的声音自然也有。
有观点称:
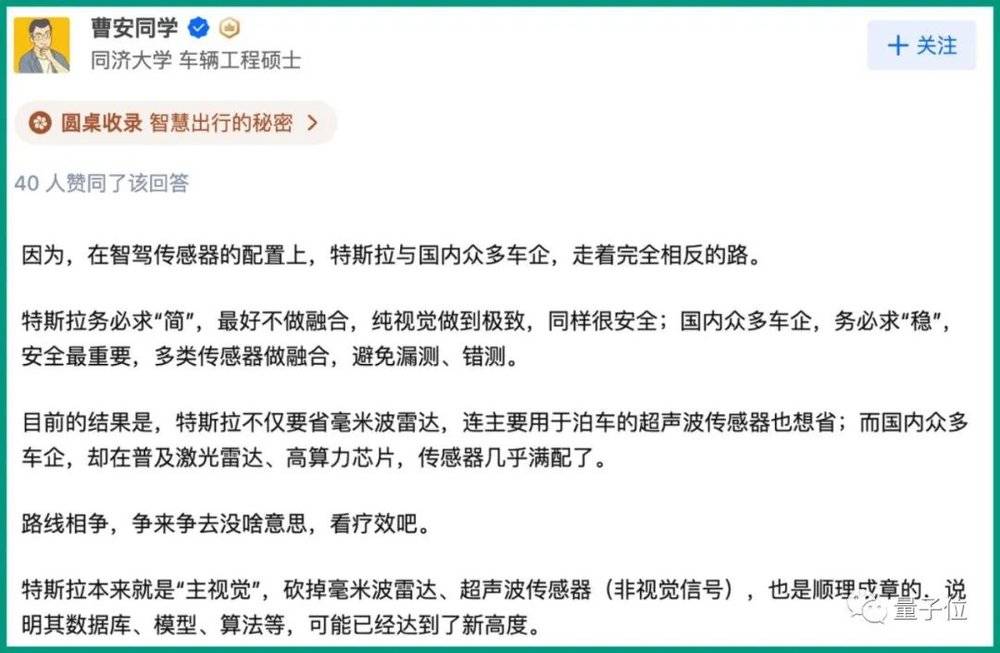
特斯拉本来就是主视觉,依次去掉毫米波雷达和超声波雷达都是顺理成章的事儿,说明其算法、模型等已经达到了新高度。
就光说这次的超声波雷达,知乎网友@EatElephant就认为,它只是一个相对较弱的辅助驾驶传感器,无法准确确定障碍物位置。
再加上得益于最新的Occupancy Network出色的能力,最新版本的FSD已经能非常准确识别周围物体的远近与形状了,所以去掉也无妨,并且可能还不会和上次取消毫米波雷达时一样出现“磨合期”。
对于纯视觉方案不靠谱这一观点,有人则搬出这样的观点,称:
国内的多传感器融合的方案在实质性上并没有在量产大规模推送的功能上证明自己的能力更好。
当然,持这个想法的人还是相信多传感器融合的方案的上限一定会高于纯视觉方案。
不过,到底谁更好,正如前面的网友所说,这是一个路线之争,争来争去没有用,还是看实际效果吧。
那么问题来了:
谁愿意做纯视觉方案的第一批测试者呢?

参考链接:
[1]https://www.zhihu.com/question/558212074
[2]https://zhuanlan.zhihu.com/p/35177313
[3]https://mp.weixin.qq.com/s/9gFAnEldiGevslxSkRsyOw
[4]https://arstechnica.com/cars/2022/10/after-cutting-radar-tesla-now-dropping-ultrasonic-sensors-from-its-evs/
[5]https://www.vzkoo.com/read/202207125c76d0078c69f9a464451f58.html
[6]https://www.dongchedi.com/article/7124852439500456456
本文来自微信公众号:量子位 (ID:QbitAI),作者:杨净、丰色