
1月27日,美国《科学机器人》杂志发表了一篇研究文章,详细介绍了美国首例机器人在猪的软组织上独立完成的腹腔镜手术,结果显示该手术在一致性和准确性方面优于专家外科医生的手动技术。
上述研究文章题为《自主机器人腹腔镜肠吻合术》(《Autonomous robotic laparoscopic surgery for intestinal anastomosis》),作者是来自约翰·霍普金斯大学怀廷工程学院机械工程系助理教授Axel Krieger等人。
主导此次手术机器人的是美国约翰·霍普金斯研究团队所设计的智能组织自动机器人(Smart Tissue Autonomous Robot,STAR)。约翰·霍普金斯医院官方微信公号在对这项研究报道中提到,该机器人尤其擅长肠道吻合术,而这是一项需要高度动作重复、高精准度的手术。吻合一段小肠的两端可以说是消化道手术中最具挑战性的一步,需要外科医生以高度的准确性和一致性进行缝合。即使是最轻微的手部抖动或错位缝合都有可能导致泄漏,而这可能会给患者造成灾难性的并发症。
“研究结果表明,我们可以对一项复杂且精妙的手术,即小肠两端的再吻合手术进行自动化。STAR 在四只动物身上进行了这项操作,其结果显著优于人类进行相同操作的结果。” Axel Krieger说。
上述研究论文也指出,研究比较了已开发的自主系统、手动腹腔镜手术和机器人辅助手术 (RAS) 的吻合质量标准——包括针放置校正、缝合间距、缝合线咬合大小、完成时间、管腔通畅和泄漏压力。来自模型的数据表明,STAR在一致性和准确性方面优于专家外科医生的手动技术和 RAS 技术。这也在体内模型中得到了印证。
约翰·霍普金斯医院在其官方微信中介绍,Krieger 教授与约翰·霍普金斯大学的电气和计算机工程教授 Jin Kang,以及位于华盛顿特区的国家儿童医院的合作者们一道,共同打造了这台机器人。当前的版本是对 2016 年模型的迭代,当时的模型准确地进行了猪小肠的修复术,但需要一个较大的切口才能进入肠道,并需要较多的人工指导。
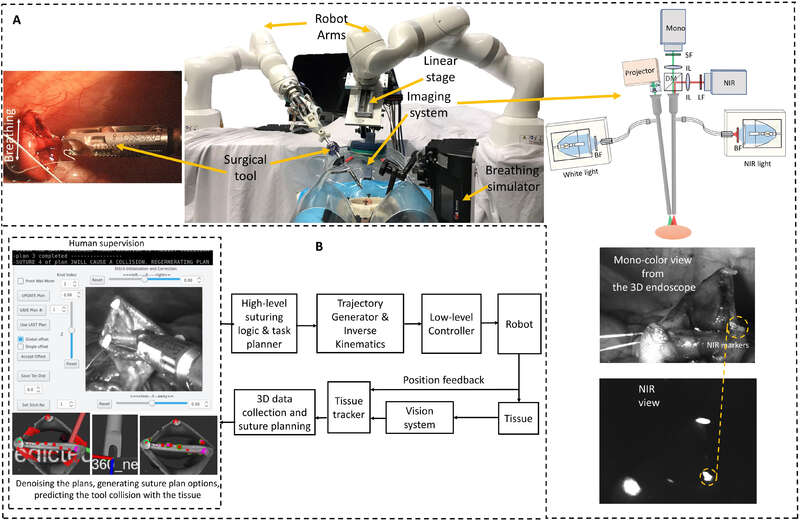
据约翰·霍普金斯医院介绍,研究团队为 STAR 配备了增强自动性和改善手术精度的新功能,这些功能包括专门的缝合工具和最先进的成像系统,可提供更为精确的手术区域的可视化。
Krieger 教授表示,由于软组织手术不可预测性,对机器人来说尤其困难,因为手术机器人必须具备快速应对意外障碍的适应能力。而STAR具备的新型控制系统使其能像人类外科医生一样实时调整手术计划。