
1月6日凌晨,机械臂成功捕获天舟二号货运飞船,6时12分转位试验开始,天舟二号货运飞船与天和核心舱解锁分离后,在机械臂拖动下,以核心舱节点舱球心为圆心进行平面转位;而后反向操作,直至货运飞船与核心舱重新对接并完成锁紧。
此次试验,初步检验了利用机械臂操作空间站舱段转位的可行性和有效性,验证了空间站舱段转位技术和机械臂大负载操控技术,为后续空间站在轨组装建造积累了经验。
天舟二号为什么要进行转位试验?
那么,什么是转位试验,转位试验的目的是什么呢?一起来了解一下。
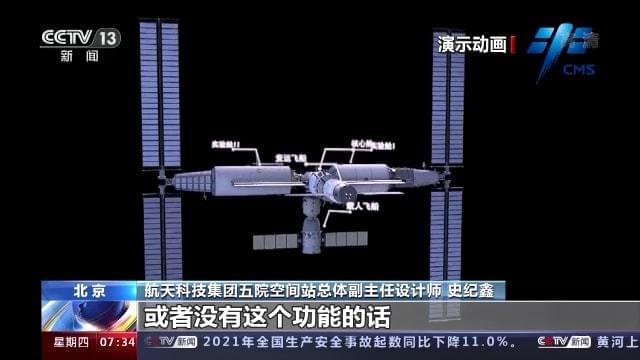
我国的空间站并不是一次性发射成型的,而是需要通过多次发射,在太空中组装建造而成。目前,我们已经陆续发射了天和核心舱、天舟货运飞船、神舟载人飞船,后续还将发射两个实验舱。

航天科技集团五院空间站总体副主任设计师 史纪鑫:我们正常的建造过程中,我们两个实验舱都是对接到前向对接口的,(实验舱Ⅰ对接到)前向对接口以后,相当于它(实验舱Ⅰ)停在这以后,等实验舱Ⅱ来的时候,它(实验舱Ⅰ)要把这个位置给让出来。
史纪鑫告诉我们,为了确保之后发射的两个实验舱能够顺利完成舱段转位任务,需要提前开展在轨转位关键技术验证,这次天舟二号的转位试验就是为了这个目的。
航天科技集团五院空间站总体副主任设计师 史纪鑫:如果是转位不成功或者没有这个功能的话,我们整个的规模可能就受限了。这个过程其实是我们整个空间站建造必须要突破的一项技术。我们只有把这个技术突破了,整个的空间站才能如期建成。
转位试验是怎样进行的?
空间站上的机械臂此前协助航天员顺利完成了四次出舱任务,但此次要搬动货运飞船,还是一个不小的考验。那么转位试验是怎样进行的?我们的空间站设计人员为了顺利完成任务,又设计了怎样的方案呢?
天舟二号的转位试验由天和核心舱上的机械臂来配合完成。首先,机械臂需要提前爬行到位于节点舱附近的停泊口,为转位试验作准备。之后,通过捕获的方式抓住天舟二号的适配器。

航天科技集团五院空间站总体副主任设计师 史纪鑫:然后在这个时候我用机械臂,推动货运飞船先解锁。解锁了以后,让机械臂驱动着货运飞船转动,转动以后再回来,回来以后再走一次交会对接,然后把货运飞船再对上来。有点像我们建一个摩天大楼的时候的塔吊,这个塔吊就相当于我们的机械臂,每个舱它相当于我们的建筑材料,就是这样的一个流程。
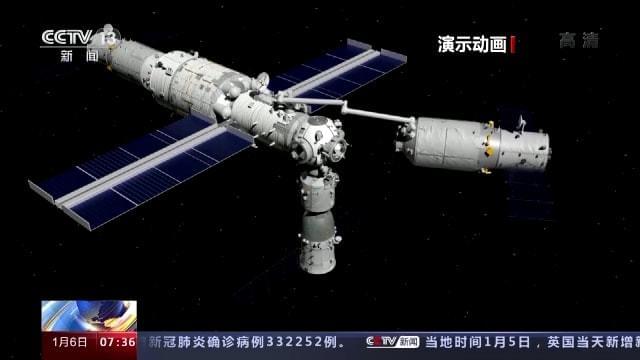
史纪鑫告诉我们,在转位试验的过程中,机械臂一端连接核心舱、一端连接天舟二号,这就像一根扁担挑着两头大象。这样的结构非常脆弱,可能会对机械臂造成损伤,因此,科研人员对转位试验进行了巧妙设计。

航天科技集团五院空间站总体副主任设计师 史纪鑫:首先我把空间站立起来,立起来以后给它先转90度,在轨道面内是一个最小的迎风面的一个飞行,这样的话它气动的扰动是最小的。立起来以后就像钟摆一样,整个舱其实是重力梯度稳定的,就是不管往哪个方向翻,它最后都会停留在纵轴上。
验证空间站建造多项关键技术
在今天(6日)的转位试验中,核心舱、机械臂、货运飞船互相配合,姿态不断发生变化,犹如太空中的变形金刚。这一系列眼花缭乱的操作过程,也验证了中国空间站建造的多项关键技术。
专家介绍,在今天的转位试验开始之前,他们在地面已经进行了大量的仿真模拟来确保试验的顺利,这次试验也是对地面仿真系统的一次验证。

航天科技集团五院空间站总体副主任设计师 史纪鑫:没有在天上去真正地去做这个试验之前,我要在地面上做一个预演,然后要预演出来天上的状态。

专家还告诉记者,空间站机械臂已经协助航天员完成了四次出舱任务,但今天的试验是对机械臂舱段转位能力的一次考验。
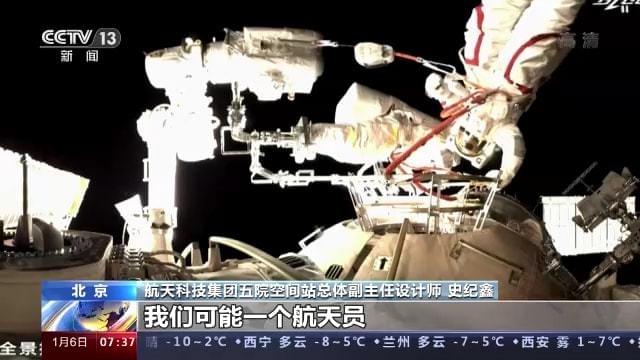
航天科技集团五院空间站总体副主任设计师 史纪鑫:机械臂从来没有承载过这么大的一个负载,像之前我们载人出舱,可能一个航天员加上他的航天服大概就是300公斤左右的一个负载。现在我们要负载到将近9吨,这样的一个负载其实也是对机械臂的一个考验。

史纪鑫介绍,目前中国空间站系统状态很好,今天的试验也为接下来两个实验舱交会对接以及空间站建造打下了基础。

航天科技集团五院空间站总体副主任设计师 史纪鑫:它是一个多系统的联合验证,首先是机械臂在对接的过程中,其实它速度是不够的,所以还要GNC(制导导航与控制)分系统给它一个速度,让货运飞船能圆满对接上来。对接了以后,对接机构还需要再一次对接捕获,然后再锁定,然后机械臂再撤离这样的一个过程,所以是多个系统都要参与这个里面的试验验证。
下一步将进行手动遥操作试验
在完成了今天的转位试验之后,天舟二号货运飞船下一步将配合航天员完成手动遥操作试验。任务全部结束之后,将择机再入大气层。
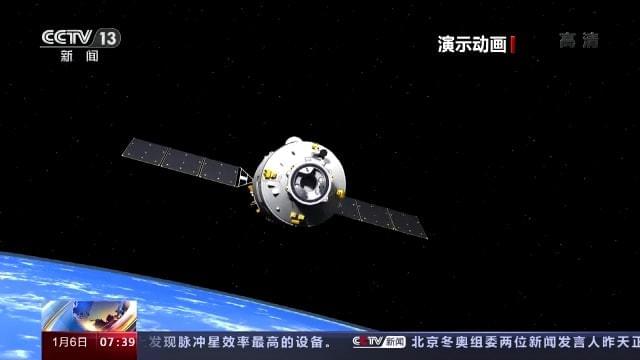
2021年5月29日,天舟二号货运飞船在海南成功发射,作为空间站建设阶段货运飞船的首发船,天舟二号不仅携带大量的航天员生活物资、舱外航天服、科学仪器等重要物资,还承担了空间站推进剂补加的任务。

2021年9月18日,天舟二号货运飞船从空间站天和核心舱后向端口分离,并绕飞至前向端口完成自动交会对接,在完成今天的转位试验之后,天舟二号下一步将配合航天员完成手动遥操作试验。

航天科技集团五院天舟二号货运系统总体主任设计师 杨胜:航天员在核心舱控制货运飞船,然后进行手动遥控撤离和对接试验。现在货船交会对接有两种模式,正常的话是自动交会对接,如果出现异常情况,我们还有手动遥操作的备份手段,这个实际上主要是为备份的手段做一个在轨验证。
杨胜介绍,天舟二号在完成所有任务之后,会择机脱离空间站核心舱,离轨前还会将废弃物打包带走,再入大气层中烧毁,这也是空间站建设的关键技术之一。
航天科技集团五院天舟二号货运系统总体主任设计师 杨胜:这些任务完成之后会根据它的整体消耗情况和寿命情况,择机脱离空间站,也会把废弃物带回大气层中烧毁,所以说天舟二号应该是任务最多、最艰巨、停靠时间也会相对比较长的一个货运飞船。