
本文来自微信公众号:果壳(ID:Guokr42),作者:贾懒,编辑:小毛巾、游识猷,头图来自:《爱、死亡与机器人》
在科幻剧《爱、死亡与机器人》中,有一集是角色通过头戴式设备用意念操控怪兽互搏,这种能让人通过意念进行操控的设备,便是脑机接口(BCI)。

意念能操控,但没手感啊
现在的一些脑机接口可以让我们用眼睛打字,让猴子看着屏幕打游戏,但如果牵涉到更精细的操作,比如像科幻剧中操控怪兽打架,或者哪怕只是接住一个掉下的杯子,没有手感都很难做到。
我们对四肢和手部传来的感觉习以为常,甚至意识不到这些感觉有多重要。倘若你使用没有触觉反馈的脑机接口,就好像是在操纵抓娃娃机:是不是抓对地方了?抓得够紧吗?会不会抓不住?会不会把娃娃戳破了?我们都不得而知——你很难抓住一个你根本感觉不到的东西。

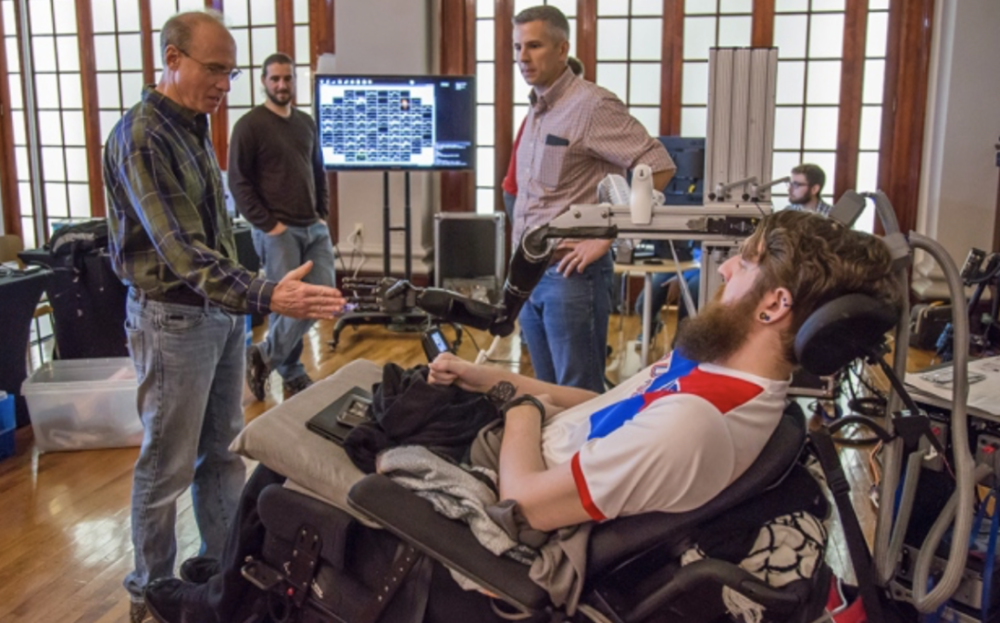
因为脊椎损伤而失去运动能力的病人,可以利用脑机接口来实现简单的意识操控。现有的脑机接口主要是通过视觉来控制机械手臂抓取、移动物体,就像我们夹娃娃一样缺乏真实抓到的感觉,因此动作会非常笨拙、缓慢。参与脑机接口实验的病人也表示:“当只有视觉反馈的时候,我只能看到那只手碰到了那个物体。如果我用它来捡东西,有时候东西就会掉下来。”
怎么才能让意识操控机械的时候,还能有真实的感觉呢?答案就是双向脑机接口,也就是大脑-机器-大脑。大脑的意识操控机器后,机器还能将触觉刺激反馈给大脑,实现实时操控。
“脑-机-脑”更胜一筹
近日,美国匹兹堡大学的研究团队在《科学》上发布了最新的双向脑机接口研究成果,可以让人用意念控制机械臂捡拾物体时,也能向人的大脑提供直接的触觉反馈。
参与研究的内森·科普兰(Nathan Copeland)在2004年因为车祸成为瘫痪病人,仅有手腕、几根手指和部分肩膀仍有知觉。他六年前就开始参与实验室的脑机接口研究。
因为这场实验,他成了世界上第一个同时在大脑运动皮层和躯体感觉层中植入微电极阵列的人,躯体感觉层就是大脑中处理来自身体的感觉信息的区域。这样脑机接口不仅能解码他的运动意图从而操作机械臂,还能够让他感受到触觉反馈。
一开始科普兰参加实验的时候,接受的是依靠视觉来操纵机械臂的传统训练。三年后,科普兰可以非常熟练地用意念让机械臂移动球体或抓住立方体。然而,健全的人类只需要花费5秒钟的抓握任务,科普兰通常要花费20秒左右的时间来完成。
光靠视觉控制的训练已经到达了瓶颈期,研究人员决定让科普兰接受来自机械臂的触觉反馈,打通从机器到大脑的双向反馈通路。
![有了触觉反馈,完成同一项任务要省不少时间。表现好时,甚至不到4秒就能完成任务丨参考文献<sup>[1]</sup><br>](https://i.aiapi.me/h/2021/06/09/Jun_09_2021_08_21_23_10225453512300999.gif)
通过给机械臂的手指根部加装扭矩传感器,来检测手指运动时产生的旋转力,再模拟人类手指感受到压力时的电信号,将电信号通过脑机接口传入到植入在科普兰头皮内部的微电极阵列里,这样科普兰就感受到了机械手臂所触摸的物体。
科普兰因此体验到了一种奇妙的触觉,类似压力和轻微的刺痛感。这种触觉反馈的强度会根据手施加在物体上的力的大小而变化,这让他的训练成果突飞猛进。从前,他会犹豫地摸索,试图确定自己的确抓住了东西。现在有了触觉反馈,他要完成抓握任务,只要10秒就够了,时间缩短了一半。
机械手臂所增加的触觉传感器,实现了和生物体类似的“实时传导”,大脑对手部触觉的延滞时间大约为30毫秒,而传感器每20毫秒就向脑机接口发送一次信号。这种实时的反馈让科普兰觉得非常自然,“这种控制非常符合直觉,以至于我基本上只是在想事情,但好像是在移动我自己的手臂。”
触觉不太真实,大脑还连着线
双向脑机接口可以让人意念操控机械臂做出完整和自然的动作,对帮助瘫痪病人恢复运动能力来说是一大进步。不过,这种脑机接口技术仍然受到较多的限制,它需要依靠庞大的有线设备与受试者的大脑进行连接。
去年马斯克曾展示了精巧轻便的无线连接设备,类似的装备如果能投入使用,将省去不少麻烦。

另外,触觉反馈的真实度有待提高,现有的传感器仍无法像真实人类的手一样来控制微妙的力道、完成更复杂的任务。科学家们正在探索通过在病人四肢中装入电极,再配合外骨骼来恢复运动能力。也许有一天,瘫患者操控的不再是机械手臂,而是自己原本的手脚。
未来,这项技术可能让许多瘫痪的患者实现部分自由,比如不必依赖看护者就能给自己倒杯水,并把这杯水送到嘴边。类似这样的“小事”,对他们来说会是改变生活的“大事”。
参考文献
[1] Flesher S N, Downey J E, Weiss J M, et al. A brain-computer interface that evokes tactile sensations improves robotic arm control[J]. Science, 2021, 372(6544): 831-836.
[2]https://www.wired.com/story/this-brain-controlled-robotic-arm-can-twist-grasp-and-feel/
本文来自微信公众号:果壳(ID:Guokr42),作者:贾懒