
图 | 软体机器鱼(来源:受访者)
又是什么让这款机器人小车滚滚前行?
图 | 机器人小车(来源:受访者)
虽然一个是 “鱼”、一个是车,看似风马牛不相及,但它们有着共同的 “机器心脏”—— 柔性电液泵。
图 | 柔性电液泵(来源:受访者)
该“心脏” 由浙江大学机械工程学院邹俊课题组设计,也是世界首个可通过自身液体自愈的柔性电液泵。
他告诉 DeepTech,研究灵感来自于蜘蛛,其体内含有一套独特的生物液压系统,蜘蛛心脏是核心动力部件,通过心脏把血淋巴泵送到腿部,血淋巴的液压能量、就能转换为腿部的敏捷运动。
此外,蜘蛛的自然进化,可让血淋巴主动对受损组织、或皮肤进行自修复,从而极大提高环境适应力。
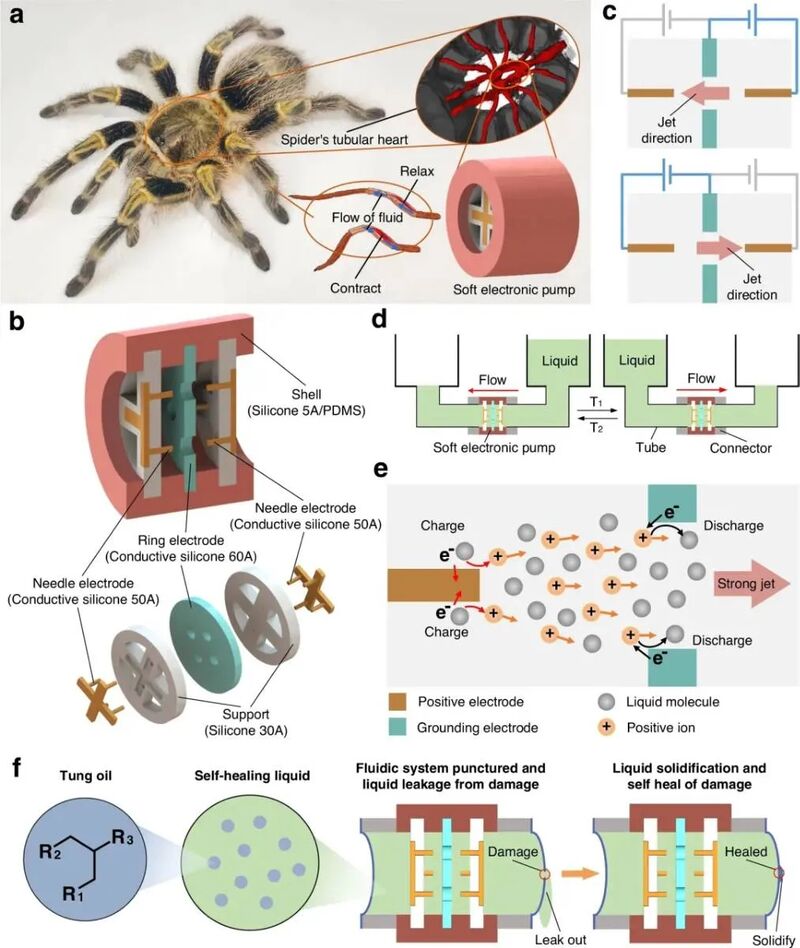
图 | 柔性电液泵的结构、原理以及自愈(来源:受访者)
邹俊表示:“一直以来,跑冒滴漏和噪声问题,是液压系统的顽疾,这严重制约了液压系统的应用。”
此外,传统液压系统由于便携性差,使用时非常受限。那么能否研究出一种液压泵,其功能类似于蜘蛛心脏,既能驱动又能自愈呢?
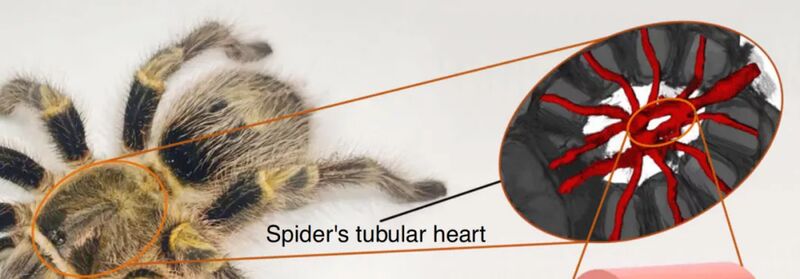
图 | 蜘蛛心脏位置(来源:受访者)
受此启发,他和团队研发出这款柔性电液泵,通过电场就能实现介电液的静音泵送,还可通过在液体中添加自愈因子,实现破损和渗漏区域的自我修复。
4 月 14 日,Nature Communications 报道了这一研究成果,论文标题为 “Customizing a self-healing soft pump for robot”。其中,浙江大学博士研究生唐威为论文第一作者,张超副研究员和邹俊教授为论文通讯作者。

图 | 相关论文(来源:受访者)
当古老的桐油遇见科学

据邹俊介绍,无需移动部件,柔性电液泵就能实现液体的运动与操控。
其主要构件包括:一个带有四个圆孔的柔性环电极、两个带有四个针的柔性针电极、两个绝缘电极支架、和一个绝缘弹性体外壳。
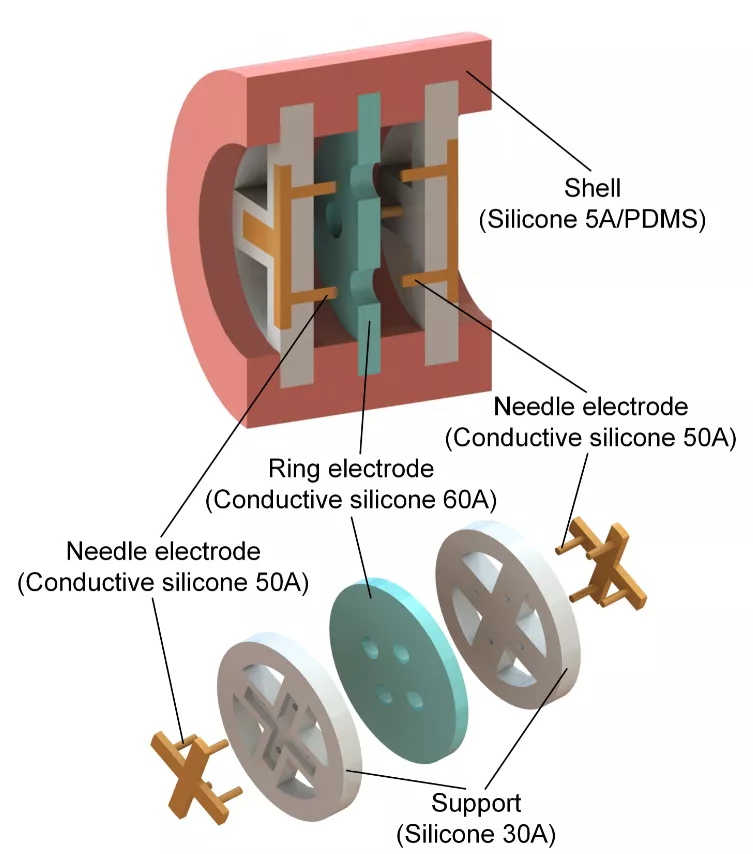
图 | 柔性电液泵的基本结构(来源:受访者)
研究中他和团队发现,由柔性硅橡胶材料制成的针孔电极对,可实现电流体的动力输出,基于此他和团队设计出了由全柔性材料制作的柔性电液泵。
为了实现类似蜘蛛血液的自愈功能,他改进了柔性电液泵泵送的电响应介电液体,并在其中均匀融入桐油液体。
这样可让电响应介电液体、蜕变成一种可修复破损硅胶外壳的自愈性液体,从而实现液体泵送和自我修复的双重功能。
图 | 戳破外壳来进行自愈能力检测(来源:受访者)
其中,中国古人就在使用的桐油,在研究中起到了重要作用。
桐油是一种干性油,它由氧键脂肪羧酸残基和活性共轭碳 - 碳双键组成,因此具有优良的固化性能,其在空气中会固化成膜,并可用于修复受损的柔性材料。
因此,基于桐油改进后的功能液体,不仅具备电流体的驱动性能,又具备桐油的修复功能,柔性材料再也无惧损坏。
图 | 被戳破后的流体具备自愈功能(来源:受访者)
改进后的功能液体,全名叫癸二酸二丁酯 - 桐油溶液,里面均匀地溶解着桐油。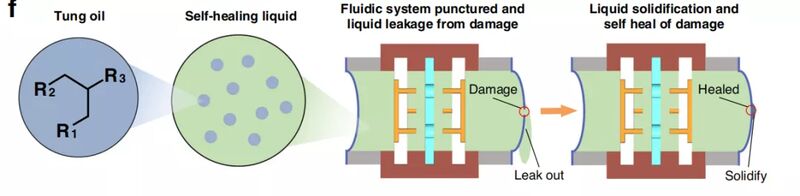
图 | 柔性电液泵自愈液体治疗损伤的示意图(来源:受访者)
当桐油暴露在空气中时,由于活性共轭碳 - 碳双键很容易和氧气结合,因此会被和氧连接的脂肪羧酸残基吸收,从而引发均聚反应,最终会形成固体膜。
当柔性材料受到损伤时,泵内自愈液会暴露在空气中,凝固后即可自动修复损伤。修复完成后,泵不仅能恢复正常工作,而且不发生任何泄漏。

图 | 功能性液体的自愈能力(来源:受访者)
同时,受损后的自愈材料,其原来的特征也可得到保留。
具体来说,在 20℃ 时,自愈膜的储能模量为~14.3kpa,在 25℃ 时为~13.2kpa,在 30℃ 时为~10.6kpa。
在以上三种温度下,自愈膜的损耗模量分别为−3.1 kPa、−2.5 kPa 和−2.1 kPa。由此可见,能量损失非常少。
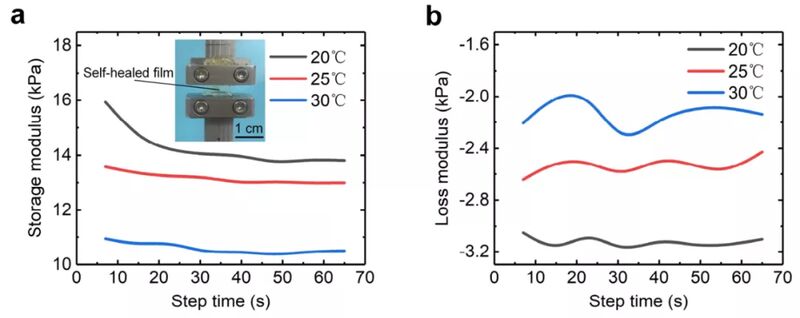
图 | 自愈膜的储能模量及损耗模量测试(来源:受访者)
为了进一步验证自愈膜、和硅橡胶膜之间的粘附性能,邹俊对这两种膜进行了重复拉伸试验。
把硅橡胶膜以每次 20% 的应变、重复拉伸 200 次后发现,硅橡胶膜与自愈膜仍能牢固地粘结在一起,这说明它们之间具有良好的粘结性能。
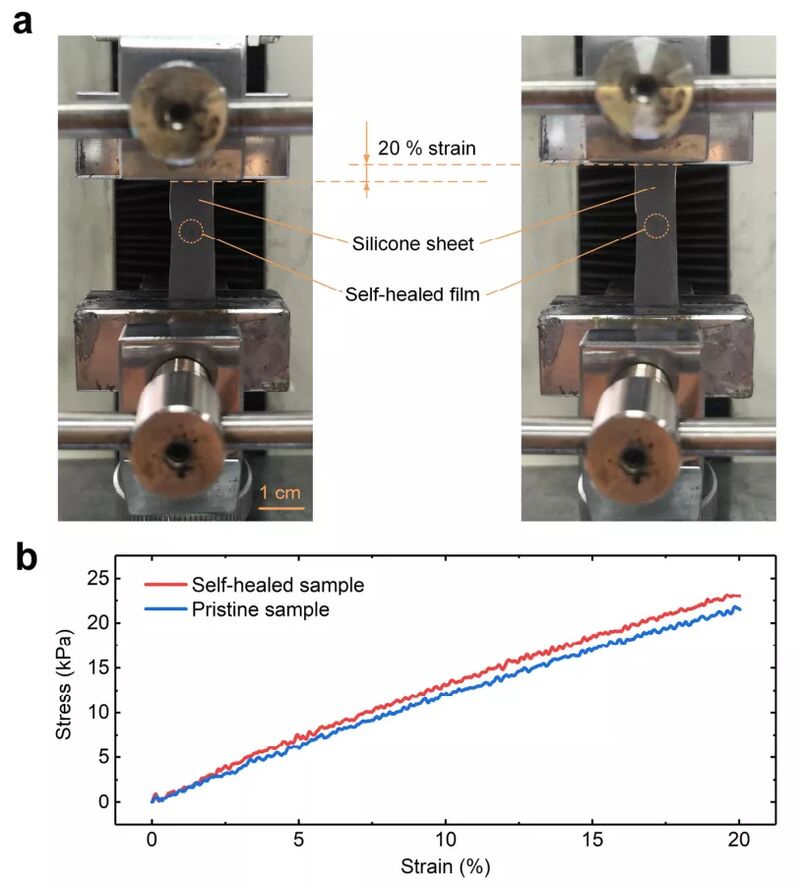
图 | 自愈膜与硅橡胶膜的粘接拉伸测试(来源:受访者)
但温度对自愈时间有着明显影响,同样受损情况下,35℃ 环境中完全自愈耗时约 6 小时,24℃ 环境中自愈耗时约 1 天。
修复后的流体动力系统,能连续工作 2 小时,而且全程无泄漏,这证明了该自愈方法的有效性和可靠性。
不过,这种自愈只能在空气中实现,而无法在水中实现,因为水中缺乏与空气的接触。
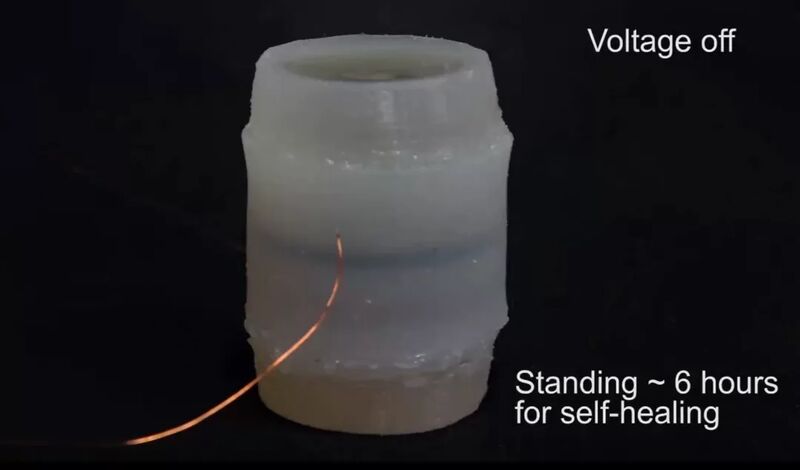
图 | 自愈过程(来源:受访者)
就柔性电液泵的工作步骤来说,当泵内充满功能液体时,在柔性针孔电极的电场作用下,针孔之间可以产生射流,以便实现泵送功能。
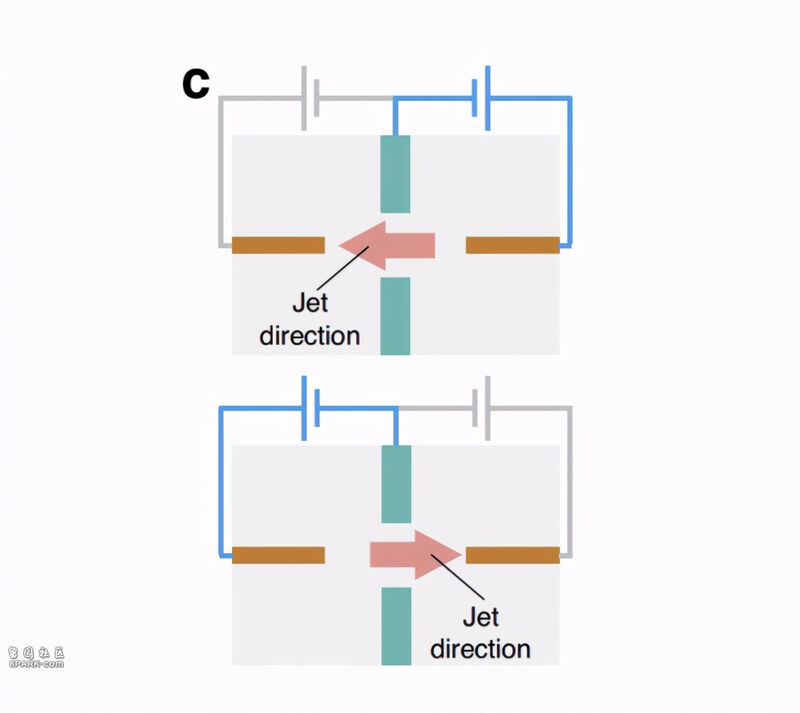
图 | 柔性针孔电极对之间产生强大的射流(来源:受访者)
由于柔性针电极、位于柔性孔电极两侧,通过电路的切换,柔性电液泵能快速实现流体的正反向流动,从而变成一个高度可控的双向变量液压泵。
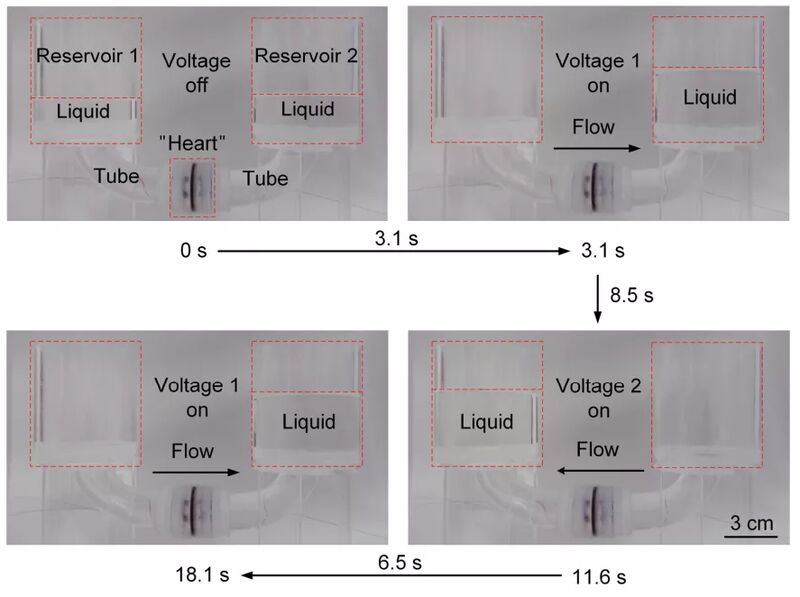
图 | 用柔性电液泵在两个圆柱形储罐之间泵液体(来源:受访者)
其工作原理是,在正极和接地电极之间的强烈、且不均匀电场作用下,针电极附近少量中性液体分子中的电子,被剥离变成正离子。
在库仑力(一种物理学定律)的作用下,这些自由的正离子、从针电极快速移动到孔电极,并拖动大量的中性液体分子、与之一起流过孔电极,从而形成强大的射流。
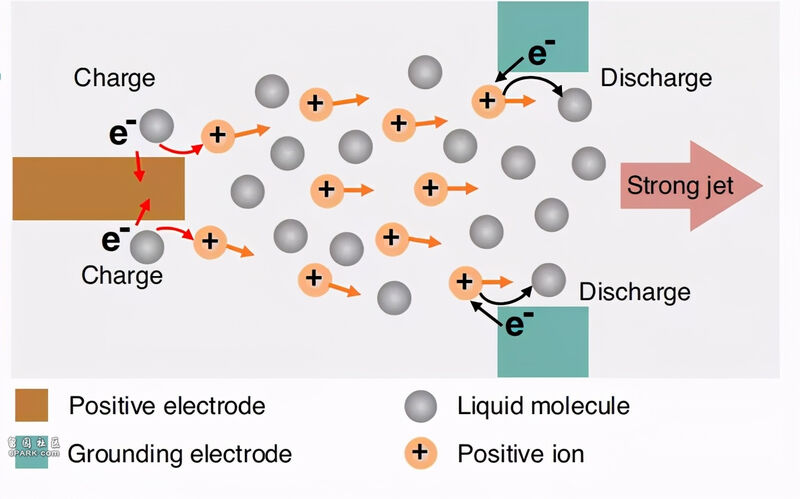
图 | 柔性电液泵的工作原理(来源:受访者)
当正离子到达孔电极时,正离子在接地的孔电极上放电,重新变成中性液体分子。在通电情况下,这些过程会持续进行,泵内液体也会一直流动。除非切断电流,流动才会停止。
此外,邹俊还对柔性电液泵进行了理论建模,并用仿真软件 COMSOL Multiphysics 进行了数值模拟。
图 | 柔性电液泵带来的动力(来源:受访者)
为了匹配柔性电液泵,他们还自主设计出一款小型驱动电路板,该电路板使用电池、或无线电力传输系统作为动力,它能让柔性电液泵实现双向可逆泵送。
结合小型驱动电路板,柔性电液泵可嵌入不同的液压动力系统和机器人系统,从而让前文的软体机器鱼和机器人小车实现无束缚运动,这也是无束缚软体机器人中的巨大进步。
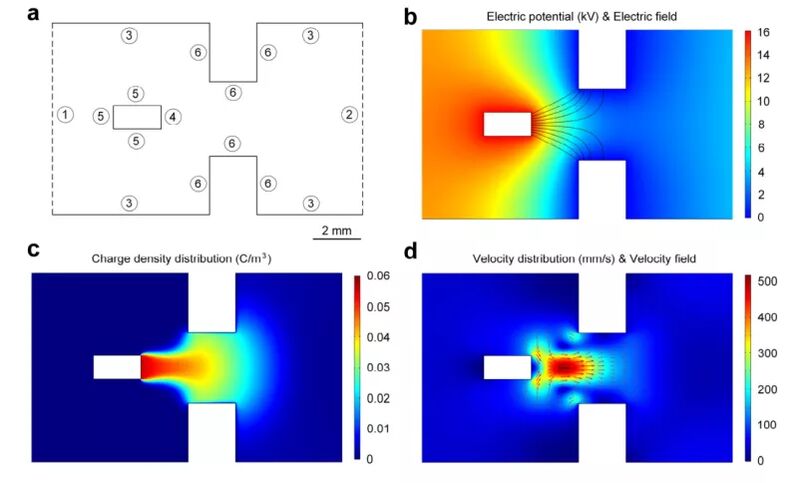
图 | 柔性电液泵的数值模拟结果(来源:受访者)
可实现液压系统的 “私人订制”

实际应用中,就电液泵的外貌和泵送能力来说,不同液压动力系统的需求,也各不相同。庆幸的是,柔性电液泵的尺寸和形状,可根据具体需要进行定制。
泵的尺寸可大可小,为的是可以匹配不同尺度的机器人系统。此外,柔性电液泵的外壳和电极配置的设计空间很大,比如可以设计成圆柱形、三角形、五角形和模仿心脏外形等。
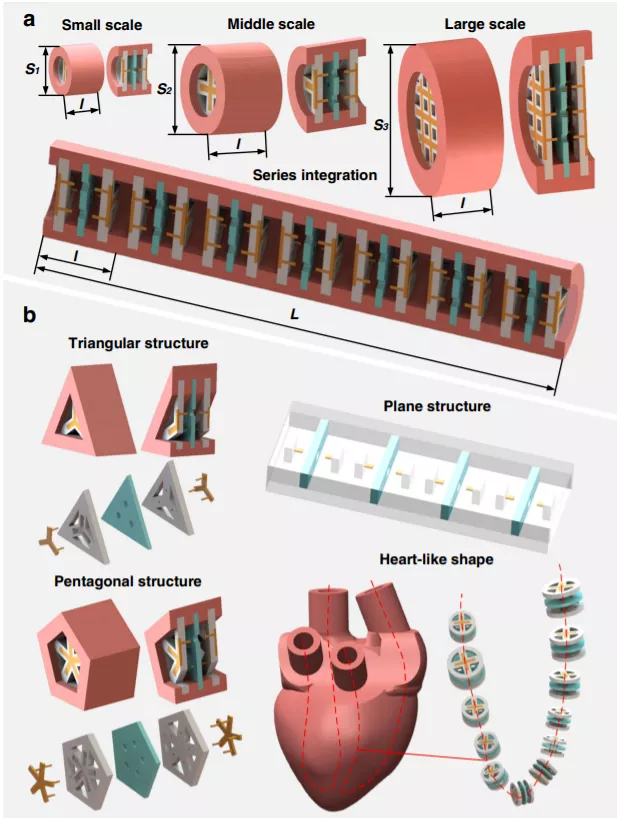
图 | 各种尺寸及形貌的柔性电液泵(来源:受访者)
另外,柔性电液泵通过针孔电极对产生流动,产生的流量与压力较大,并且它由轻量化的柔性材料制成,质量也比较轻。
相比同尺寸的传统刚性泵,在同样重量下,这种泵能产生更大的输出流量和压力,同时具备较好的可携带性。
在可控性上,柔性电液泵为一种电控泵,只需结合驱动电路板,就可实现快速双向可逆控制。
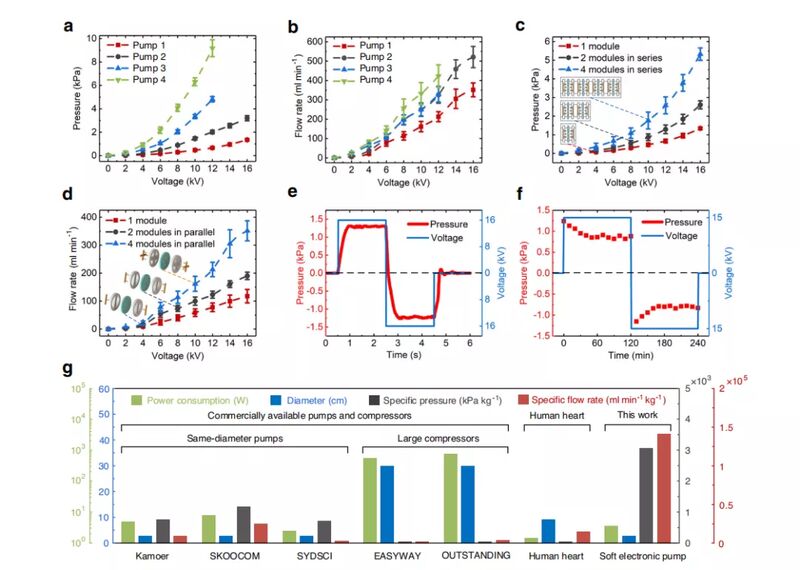
图 | 柔性电液泵的泵送性能及性能对比(来源:受访者)
在驱动上,它可实现静音驱动,因为它不含可移动部件,因此驱动时既没有声音、也没有振动。
当然最重要的,是柔性电液泵的自愈能力,一旦柔性材料能实现自我修补,就能给相关设备节约制造成本。
不过邹俊也坦言,目前的柔性液压泵只是初期版本,在驱动能力、制作方式和响应速度上,还有较大提升空间。
其还表示:“该研究为液压系统的静音驱动和自修复,提供了新型解决方案,有望大幅提升液压系统的环境自适应能力,同时也为穿戴式装备的无绳驱动,提供了新思路。”