
美国波士顿动力的Spot mini、麻省理工(MIT)的“迷你猎豹”,中国腾讯的Jamoca、宇树科技的A1、Dogotix的DG-160A……四足机器人,也就是多数人口中的“机器狗”,正在迅速进入人们的视线。
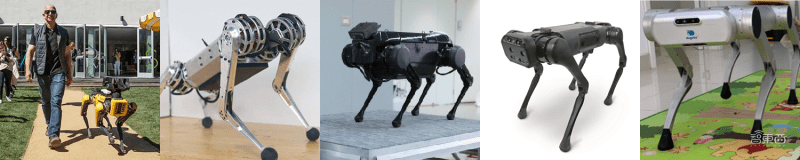
▲美国波士顿动力的Spotmini(左一)MIT的“迷你猎豹”(左二)中国腾讯的Jamoca(左三)宇树科技的A1(右二)Dogotix的DG-160A(右一)
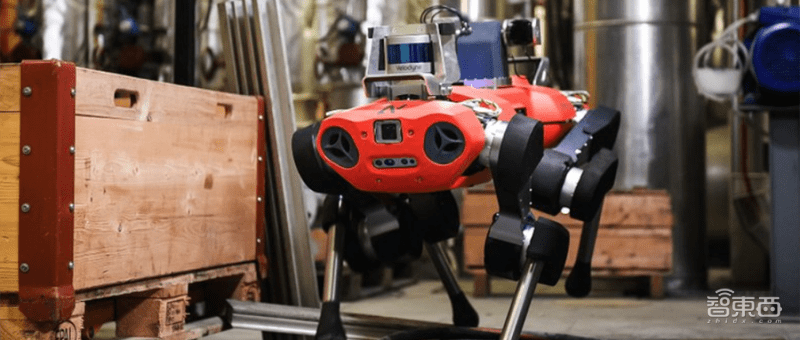
而这次抓住人们眼球的,并不是一只跑起来“哒哒”作响的普通机器狗,它拥有穿上轮滑鞋的四肢,但并未丧失作为机器狗“撒欢儿、打滚儿”的技能。最重要的是,在它穿上轮滑鞋暴走之前,还在一些工厂任职呢。
▲穿上“轮滑鞋”暴走的机器人ANYmal
这只能流畅滑行的机器狗名叫ANYmal,名字在发音上酷似animal(动物),来自于一个瑞士的公司——ANYbotics。
这一团队是苏黎世联邦理工学院机器人系统实验室(RSL)的衍生公司。自2009年以来,ANYbotics团队一直在制造四足机器人,至今为止研发出的每一代机器人都在成熟度、自主性和可靠性方面较上一代有所突破。
面对第一批商业需求,这个团队于2016年成立了ANYbotics公司,以开发用于实际应用的腿式机器人,并在2018年和2019年相继推出四足机器人ANYmal B和ANYmal C,其中ANYmal C就是我们在开篇看到那只脚踏“风火轮”的机器人原型。
为机器狗的四条腿装上轮子,是他们最新的研究成果。他们把这一成果通过题为《Whole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots(为轮腿式机器人配备全身模型预测控制和在线步态序列)》的论文发表在arXiv预印本平台上,论文由苏黎世联邦理工学院的几位作者撰写。
▲发表在arXiv预印本平台上的相关论文
论文链接:
https://arxiv.org/abs/2010.06322
作者之一Marko Bjelonic在接受外媒IEEE Spectrum的采访时说:“据我的经验,配备驱动轮的新版本ANYmal机动性可大大提高。我相信这些机器人将首次超越自然,因为没有任何动物或人能驾驭这一概念。”
▲外媒IEEE Spectrum报道作者之一Marko Bjelonic受访内容
除了形态上的优势,这家公司的机器狗从2017年开始已经对外销售了,2018年,他们已经开始获得海外订单。在商业化的探索上,他们甚至比网红机器狗波士顿动力的Spot mini做得更好。
能让研发者毫不吝啬赞美“超越自然”的ANYmal到底牛在哪?它到底是否有足够的底气能和波士顿动力机器狗竞争?这家研发出ANYmal机器人的ANYbotics公司有何来头?今天我们就通过一篇文章来起底这家公司及其四足机器人产品。
一、遛机器狗吗?让你追不上那种
穿过草坪,越过石子路,在平地上跳舞……这只有轮子的机器狗所做的每一个动作都让我觉得非常流畅,毫无违和感。
通常,机器狗展示在我们面前的形象大多是机械感满满的,它们通过被踢到再站起,以及拉动飞机或卡车来体现自身的稳定性和负载能力。而与此不同的是,ANYmal吸引到我的是它轻易就跑过人类行走的速度,以及像人类滑轮滑一样自如转弯的画面。

▲ANYmal在弯道上行进,且能在碎石子路上行走
据悉,苏黎世联邦理工学院的研究团队自2018年以来一直在ANYbotics公司试验轮腿式机器人。在新的原型中,研究人员为机器人的四只脚上都装了带有轮毂电机的轮子,而在机械本体方面保留了和其他四足机器人相似的外观。
从最新公布的视频中我们可以看出,ANYmal轮足机器人的四肢与其四个轮子协调完成的动作已经可以无缝融合了。研究人员还设计了能在车轮模式和行走模式之间切换的算法,ANYmal的速度和稳定性也得以提升。
▲ANYmal轮腿协调运动
轮足机器人相较于普通足式机器人最大的特点在于,它在保留了足式机器人能够在非平坦地面上“翻山越岭”能力的同时,还使机器人可以通过轮子跑得更快。以往足式机器人ANYmal C的行进速度只能达到1m/s,这一速度在同类机器狗中并不出色,但加上轮子的ANYmal行进速度可以直接提升至4m/s,能轻松超越正常行走的人类。
轮子能够提高机器狗移动效率的同时,却并不会降低其作为足式机器人应对复杂地形的能力,它可以在行驶过程中实现抬脚、调整方向等有高度动态性的运动。

▲四足机器人ANYmal对室内/室外环境进行探索
在图中我们可以看到,它不仅能够快速通过高高的草丛和陡峭的山丘,还能轻松在高度为20厘米(占其腿长32%)的台阶上移动,甚至能像真的狗狗一样抬起前腿28厘米。
此外,它还能在震动环境下匍匐前进,也能在保持身体重心的情况下过“单边桥”。

▲斜坡运动测试
令人惊叹的是,在地形感知方面,它是一个“盲眼”机器人。ANYmal无需任何摄像头或激光雷达,只根据机械本体对车轮下地形的感觉,就可以动态选择最佳的混合步态,实现轮子滚动和步态运动间无缝切换。如果跨越障碍物时,只使用单个轮子行进效率不高,它身上搭载的车载传感器和运动计划控制器可以选择性控制每个车轮的扭矩,将这条腿切换到腿部运动,同时保持其他腿的轮腿式运动依旧协调运行。
▲ANYmal通过感知选择最佳的混合步态
当然,为了能让ANYmal安全行进,它肯定不是“全盲”,其本体ANYmal C自身配备不同的感知传感器能确保其安全运行。同时,同步定位和SLAM(地图绘制)技术还能在复杂和动态的环境中为系统提供机器狗准确的位置信息。研发者“爸爸”再也不怕自家的机器狗跑丢了!
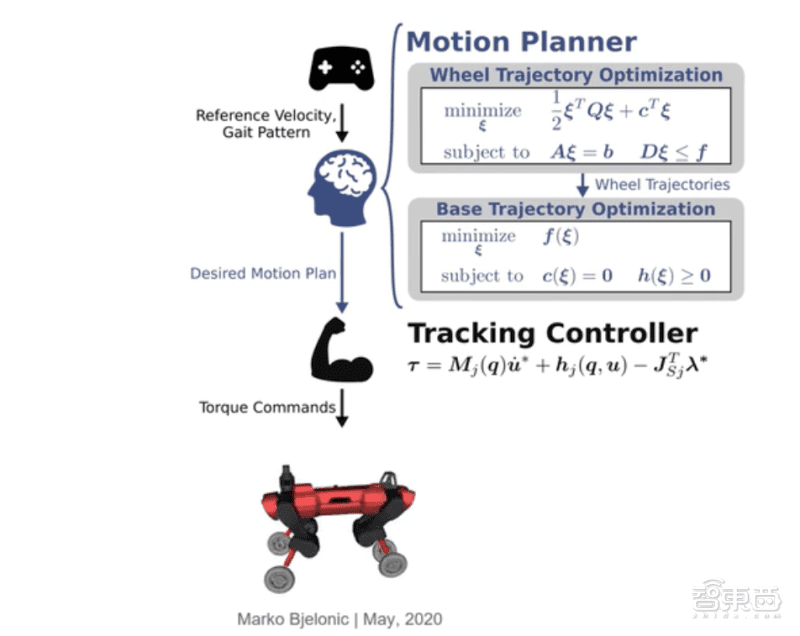
▲ANYmal的运动规划
Marko Bjelonic在接受采访时说,ANYmal使用传感器识别地形可以通过本体感受信号识别较小障碍物,他们还在进行拓展研发,使机器狗在面对例如楼梯之类的较大障碍物时也可轻松处理。
此外,ANYmal脚上的轮子目前还不是“万向轮”,尽管它能像人类滑轮滑一样通过对腿部运动的调整进行转弯,通过机器狗“髋关节(第一个执行器)”的内收、外展进行方向改变,但这对ANYmal在转向行进方面依旧是个挑战。对于这个问题,Marko Bjelonic解释道,正因为受制于没有更多自由度,研发人员后续才会探索让ANYmal通过混合滚轮进行行走运动。
Marko Bjelonic认为,受制于对额外自由度的需求和自然界中缺少相关借鉴的原因,如今市面上采用混合步态运动的产品还较少,但他认为每一个有腿的机器人都应该有轮子。
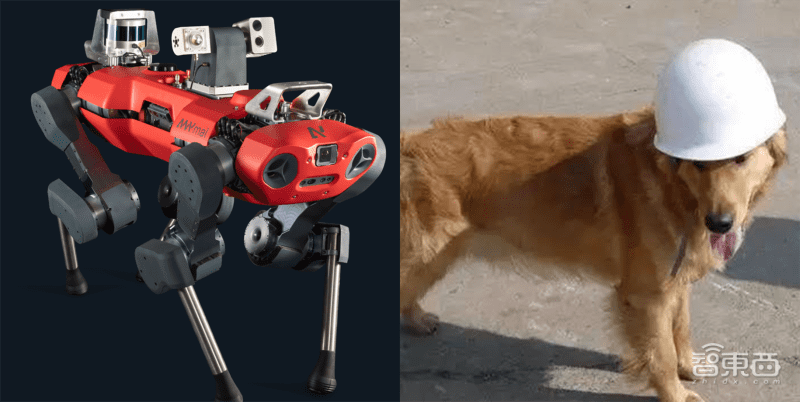
二、原型化身“工程狗”,能进工地能下水
虽说ANYmal的原型ANYmal C跑得不快,但它除了具备其他机器狗几乎都能做到的爬楼梯、避障能力外,还有一个独特的优势——能下水。
此外,研究人员还在这款机器狗的身上使用了鲜少在真实的开发环境中使用的深度强化学习技术,使其在数据驱动的开发上更有优势。由于有独特优势加持,它成为了登上《Science Robotics》封面的四足机器人之一。

▲ANYmal C登上《Science Robotics》封面
ANYmal C具有坚固的外壳,达到IP67等级防水防尘标准,能完全防尘并能在1米深的水中浸泡1小时。ANYmal C可以自己走入水中进行工作。
▲ANYmal C在水中工作
它的续航能力能超过2小时,在工作一段时间后,它还能自动上岸找到自己的锥型充电桩进行充电,或者通过人的帮助轻松换块电池。ANYmal C充电100分钟就可以恢复70%电量,3小时就能充满电。充满电后,它还可以自动站起身,重新走回水中进行工作。
▲ANYmal C上岸自己找到充电桩充电
ANYmal C在昼夜均能操作,并能在0~40℃温度下工作。因此,它可以在有雨、溅水、风、雪和灰尘的恶劣环境中凭借可靠性能进行正常运作。此外它还能抗干扰,并且适应环境,即使在恶劣环境中滑到侧翻,也能自己站起来。

▲ANYmal C在下坡的雪地上行走
在运动行进方面,ANYmal C装有感知传感器,其配备的深度相机可以对地形和障碍进行感知;360°LIDAR(激光雷达)高精度扫描可以让它的视野最远延伸到100米;前后的广角摄像机为远程操作机器狗提供了清晰视野;此外,还有基于卫星的户外环境导航可以选择使用。
这只机器狗可以在复杂的环境中实现完全自主地导航。在受到环境引导后,ANYmal C就会记住它所经过的每一个角落和缝隙,并找到完成任务的最快路径。在运行过程中,它能在动态环境下安全导航,进行实时避障,同时基于可感知的足迹计划路线,征服不同难度的地形。
为了让ANYmal C在任何场景下行走都能如履平地,ANYbotics的研究人员开发了一种本体感受控制器,选用了时间卷积网络(TCN)序列模型,根据需要从本体感受历史中推理出接触和滑动事件,并通过训练教师指导和支持本体感受的特权学习强化训练ANYmal进行越野运动,最后让控制器遍历各种不同难度的地形参数,使其鲁棒性更强(更健壮、强壮)。

▲ANYmal C在不同场景工作
此外,ANYmal C的运动能力也很多样,它的双腿完全由扭矩控制的执行器驱动,能实现全向运动,可以爬20°的坡,45°的楼梯,能克服35厘米高的台阶,能跨越20厘米的障碍,还可以爬入高度低至60厘米的空间。
ANYmal C自重50公斤,具有10公斤的有效负载能力,内置的通信和电源接口以及专用的机载计算机,可以让这只机器狗执行大部分任务。ANYbotics的CEO Péter Fankhauser说,ANYmal C拥有三台内置的英特尔i7处理器,为一些例如自动检测的任务提供算力。
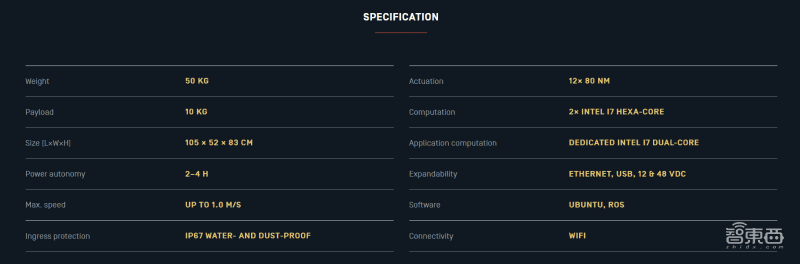
▲ANYmal C产品规格
在机器狗的背上,研发人员为其配备了一个有效载荷模块,上面集成有多种检查传感器。智能检查算法使其能够监测计量表、指示器等物体的位置、读取结果并将其转化成数字显示;同样,模块化的软件还可以检查阀门、读取油位、检查发热点和环境中的锈蚀情况等。
▲ANYmal C通过有效载荷模块识别工地故障
这些解决方案的组合,可以使ANYmal在范围较大的场景中进行巡检。在操作过程中,工作人员可以将机器人切换为远程操控模式,以便远距离干内置环境状态,这样就可以避免工作人员暴露在有害或令人不适的环境中,降低了安全隐患。
▲ANYmal C在工作中自动躲避工人
同时,ANYmal C配有一个检查单元,配备了10倍光学变焦相机、热感相机、用于频率分析的超声波麦克风,以及用于在黑暗中工作的高强度LED灯。“穿上”一身装备,ANYmal C妥妥成为一只现身工地的“工程狗”。
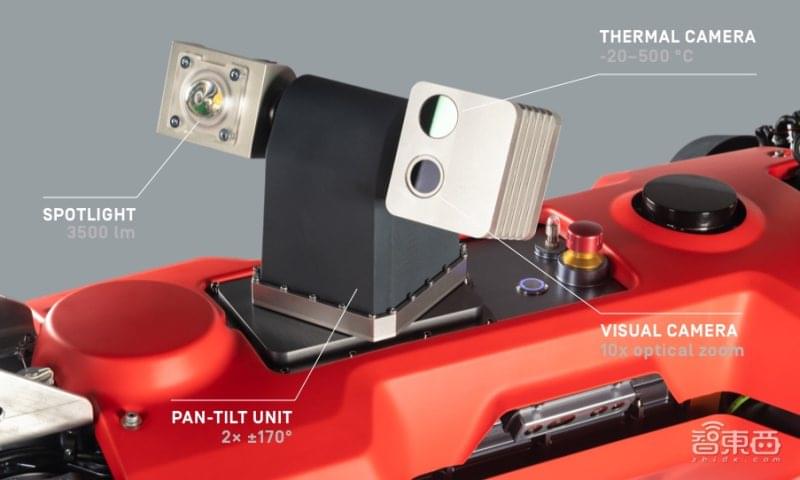
▲ANYmal C的检查单元
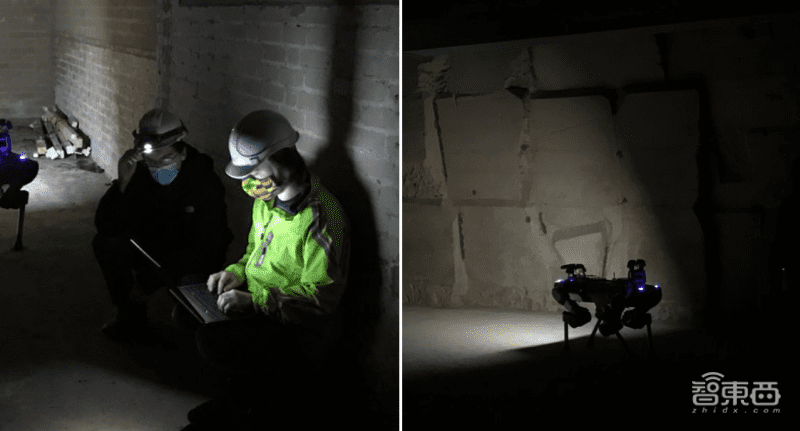
▲ANYmal C在黑暗中工作
目前,ANYmal C这款机器狗已经面向客户和工程方出售和出租,ANYbotics团队在官网中写道,如果客户想要对机器人系统进行评估,其工程师可以在全球范围内提供验证和试验安装。
三、博士天团的硬核公司!10年推出6代产品
这家位于瑞士苏黎世的硬核公司,其背后的支撑者是一群高材生,联合创始人兼CEO Peter Fankhauser、CTO Christian Gehring、技术VP Mario Mauerer和Robert Mackenzie都拥有苏黎世联邦理工学院的博士学位。

▲ANYbotics联合创始人兼CEO Péter Fankhauser
ANYbotics的CEO Péter Fankhauser说:“如今,巡检工作都由经过培训的工作人员进行,他们需要人为检查设备的完整性和环境的状态。这种手动的人工检查和记录工作既乏味冗长又容易出错,并且常常将人置于危险环境之中。”
他说,ANYbotics公司的目标是将四足机器人ANYmal背后的技术商业化,通过完全自主的机器人系统,将这些例行巡检的工作变得自动化。
ANYmal机器人可以在复杂的工业环境中行走,并且机器人身上的传感器使其能够定位、感知障碍物并在工业场所安全巡航通行。他们希望能够在复杂的工业环境中,帮助工作人员以数字化方式开展巡检和维护工作。
虽说ANYbotics公司2016年才成立,但从2009年开始,这个团队一直在制造四足机器人。2009年,苏黎世联邦理工学院研发出的第一个腿式机器人ALoF问世,这个机器人可以行走、能自我矫正,还能趴在山丘上爬行。
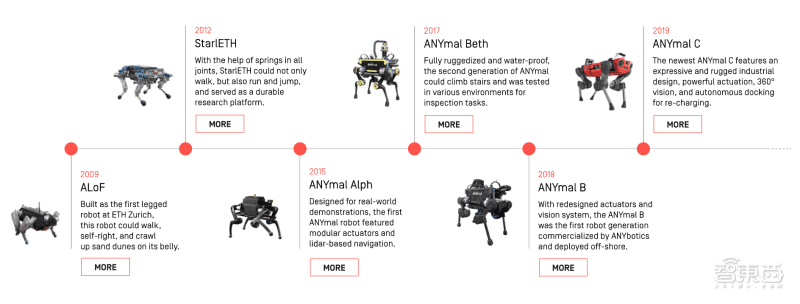
▲ANYbotics从2009年至今研发制造的四足机器人
2012年,他们推出了一个能跑能跳且耐用的研究平台StarlETH。2015年,配有模块化驱动器和基于激光雷达导航的第一款ANYmal机器人ANYmal Alph面世。2017年,公司推出的第二代ANYmal Beth机器人可以爬楼梯,并在各种环境中测试检查任务。并且在那时,ANYbotics就已经开始研发轮腿式机器人了。同年,团队迅速扩张,并在2017年完成了第一笔销售订单。
▲ANYmal Beth自己用电梯
▲早期技术尚不成熟的轮腿式ANYmal机器人
2018年,ANYbotics为其四足机器人重新设计了执行器和视觉系统,ANYmal B成为了ANYbotics公司商业化的第一代机器人,产品还顺利完成在海外的部署。
2019年,ANYbotics搬到了他们在苏黎世的新办公室,推出了最新一代的四足机器人ANYmal C,它坚固耐用,能在工业巡检中提供不错的表现,还能自己走去充电。后续,他们为ANYmal C的四只脚进行了改良,也就成为了我们在开篇看到的“滑轮滑的机器狗”。
2020年12月17日,他们完成了 2230万美元的A轮融资,并表示新获得的资金将用来帮助ANYbotics拓展业务。
四、世界上令人惊呼“想不到”的轮足式机器人
在此之前,智东西也报道过不少足式机器人和轮式机器人,波士顿动力的Spot mini算得上是四足机器人的典型代表,而我们日常见到的服务机器人也多以轮式机器人居多。而将轮足结合起来,随意切换运动的机器人在机器人家族中算得上是一个“珍惜物种”。
波士顿动力公司在2019年推出了物流机器人——Handle,它通过两只轮子行走的同时,还可以借助两条腿进行运动调整,使其不仅能精准“走”到货架,还能根据货物的高度调整腿长身高。

▲Handle根据货物的高度调整身高
再将时间往前推到2018年,意大利技术研究院还研发出了一款名为Centauro的“人马机器人”,它专为救灾任务设计,能够运用四足在地形破碎的环境中稳步移动,并使用双手搬运物体。Centauro的每条腿有6个自由度,供其灵活地行走、爬楼梯。

▲意大利“人马机器人”Centauro
此前担任韩国平昌冬奥会机器人火炬手的DRC-HUBO机器人由韩国 KAIST 团队研发,它应该算得上是较早一波出现的轮腿式机器人。但它与ANYmal轮腿切换的方式不同,DRC-HUBO在站立时是典型的人形双足机器人,而当需要它流畅快速行进时,它会直接“跪下”,用膝盖上的轮子进行移动。这种切换也是令人惊呼“想不到”。

▲韩国 KAIST 团队研发的DRC-HUBO机器人
结语:腿+轮式动力,混合步态更灵活
腿能让机器人跨越障碍,轮子能让机器人在平地上快速移动,二者如果能结合且能任意切换,就能实现机器人在运动上的一大跨越。但受制于自然中没有仿生标准,以及二者在技术上的融合难题,真正亮相在人们眼前的轮腿式机器人少之又少,而ANYmal做到了这一点。
它在草地、石子路甚至是在上楼梯时灵活地滑行、跳跃的样子,甚至让人们觉得轮子就是长在这只“机器狗”的狗爪肉垫上。给机器狗装上轮子,或许成为了四足机器人界的一个新突破。我们也期待这个学霸云集的公司ANYbotics后续还能令人惊呼“想不到”的新惊喜。